Ressourcenwächter zusammenbauen
Wählen Sie die entsprechenden Sensoren gemäß den Sensorkonfigurationen auf der Grundlage Ihrer Messanforderungen aus. Die folgende Montageanleitung enthält die folgenden Sensoren:
- Sensirion SCD30 für CO2
- Sensirion SGP40 für VOC
- Bosch BME280 (4 Stifte, 5V Version) für Lufttemperatur / Feuchte / Luftdruck
- Vishay/Adafruit VEML7700 für Beleuchtungsstärke
- DFROBOT SEN0232 Gravity Analog Sound Level Meter für Schallpegel in dB(A)
- Modern Device Wind Sensor Rev. C
Darüber hinaus sind die folgenden erforderlichen Komponenten enthalten:
- Mikrocontroller Espressif ESP-32 DevKitC (WROOM-32D/E)
- RTC Modul DS3231
- SD Kartenmodul DEBO MICROSD2 mit 8 GB Intenso SDHC Karte
- Für unterstützte SD-Kartentypen, siehe SD-Karte formatieren.
- 5.0″ Nextion Intelligent HMI Display 5″ NX8048P050-011R (widerstandsfähig, Auflösung 800×480)
- Die kapazitive Version NX8048P050-011C ist ebenfalls kompatibel, aber teurer.
- Es ist auch möglich, auf das Display zu verzichten und den Ressourcenwächter als nicht-interaktives Messgerät zu verwenden.
- In einigen Ländern und Regionen können Sie eine Alternative zu Nextion NX8048P050-011R/C finden: Taojingchi TJC8048X550_011R/C. Sie scheinen die Eigenmarke des OEM zu sein und sind viel billiger. Die TJC-Displays verwenden eine sehr ähnliche Entwicklungssoftware (USART HMI) wie der Nextion Editor, und wir bieten auch entsprechenden GUI-Code dafür an, siehe
./software/gui/TJC_USART_HMI
- Überbrückungsdrähte (Stecker auf Buchse)
Wenn Sie unser Gehäusedesign verwenden und das Gehäuse gemäß unserer Anleitung vorbereitet haben, benötigen Sie die folgenden Teile, um die Leiterplatte, die Sensoren und das Gehäuse zu befestigen:
- 4x Linsenkopfschrauben, M3 x 8mm,
- 4x flache Senkkopfschrauben, M3 x 10mm,
- 12x Sechskantmuttern, M3,
- Je nach Sensorauswahl mehrere Linsenschrauben (M2 x 6~8mm) und Sechskantmuttern (M2) zur Befestigung des Sensors am Gehäuse.
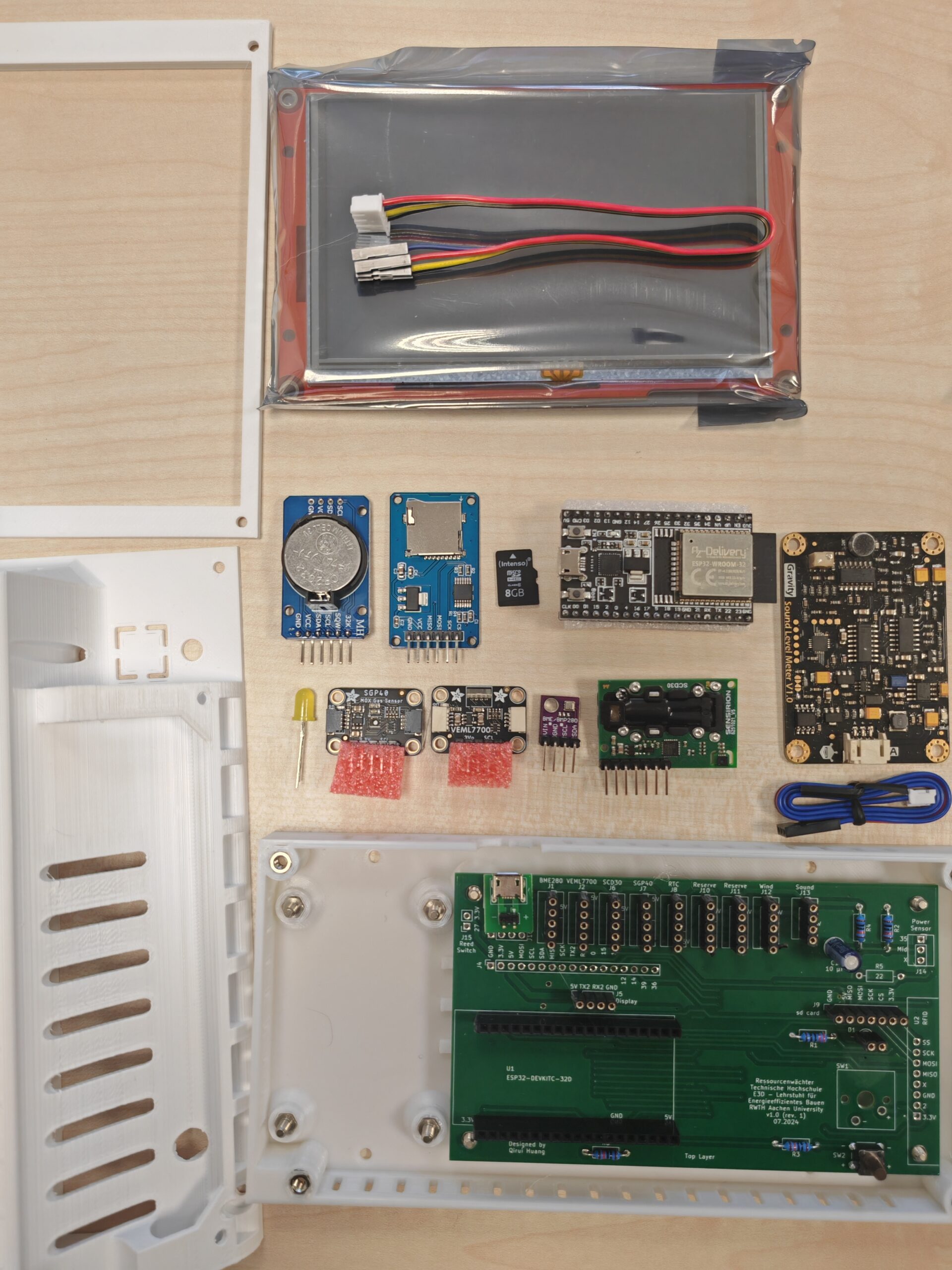
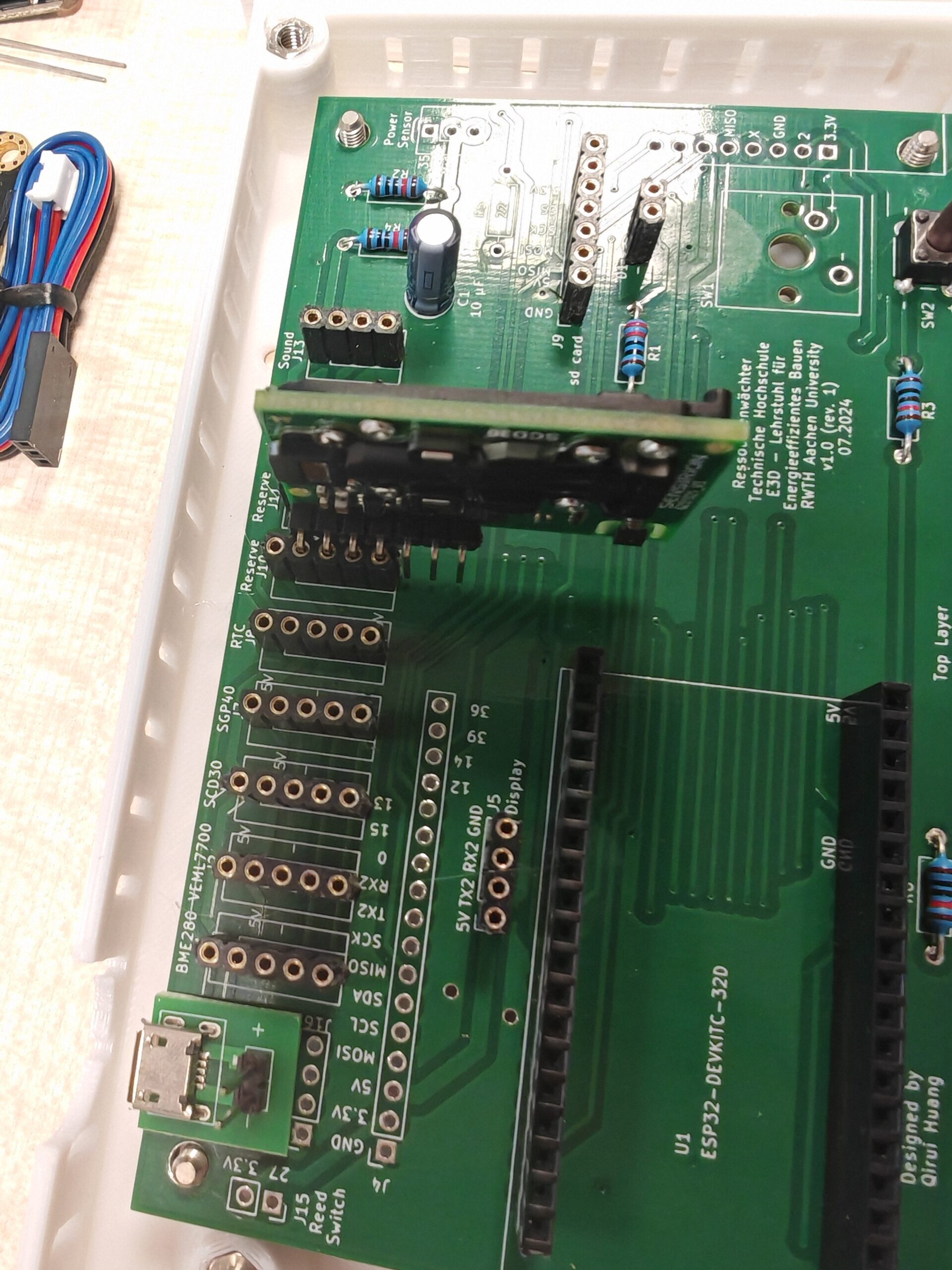
Die in diesem Leitfaden verwendeten Komponenten sind in der nachstehenden Abbildung dargestellt.
1. Installation der LED-Anzeige
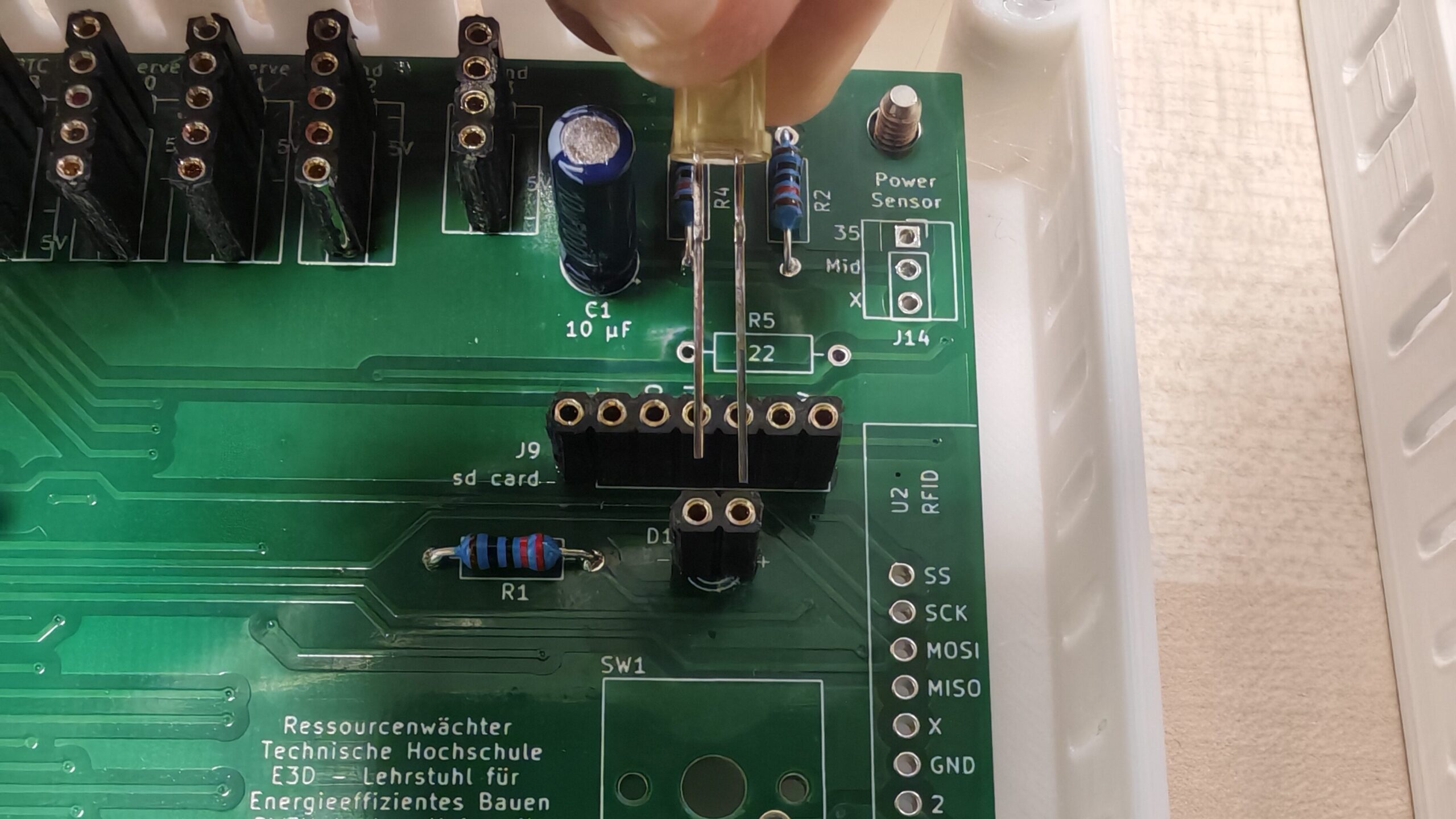
Wählen Sie Ihre bevorzugte LED-Farbe und Größe. Schneiden Sie die Stifte so zu, dass sie in die Stiftfassung passen.
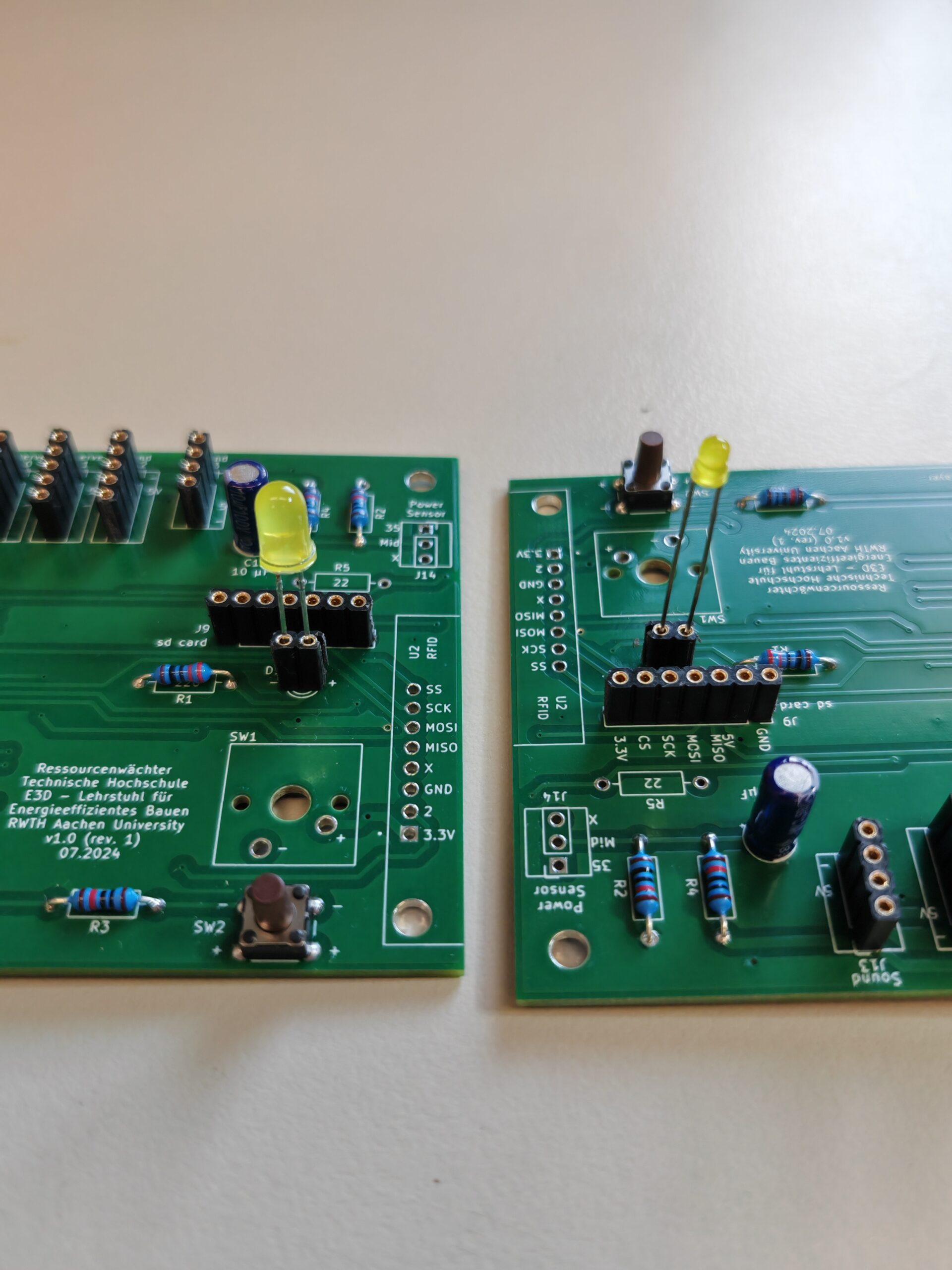
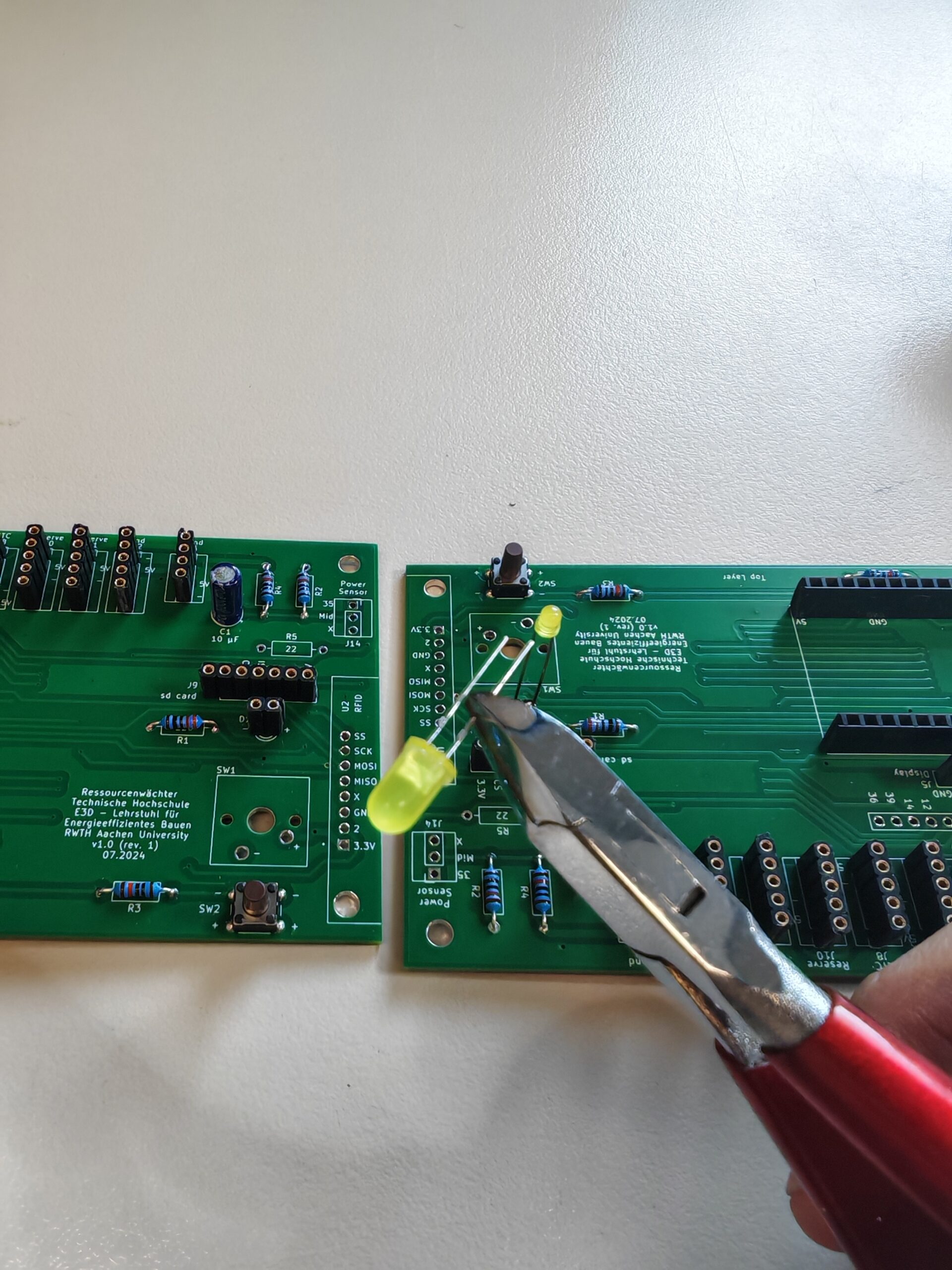
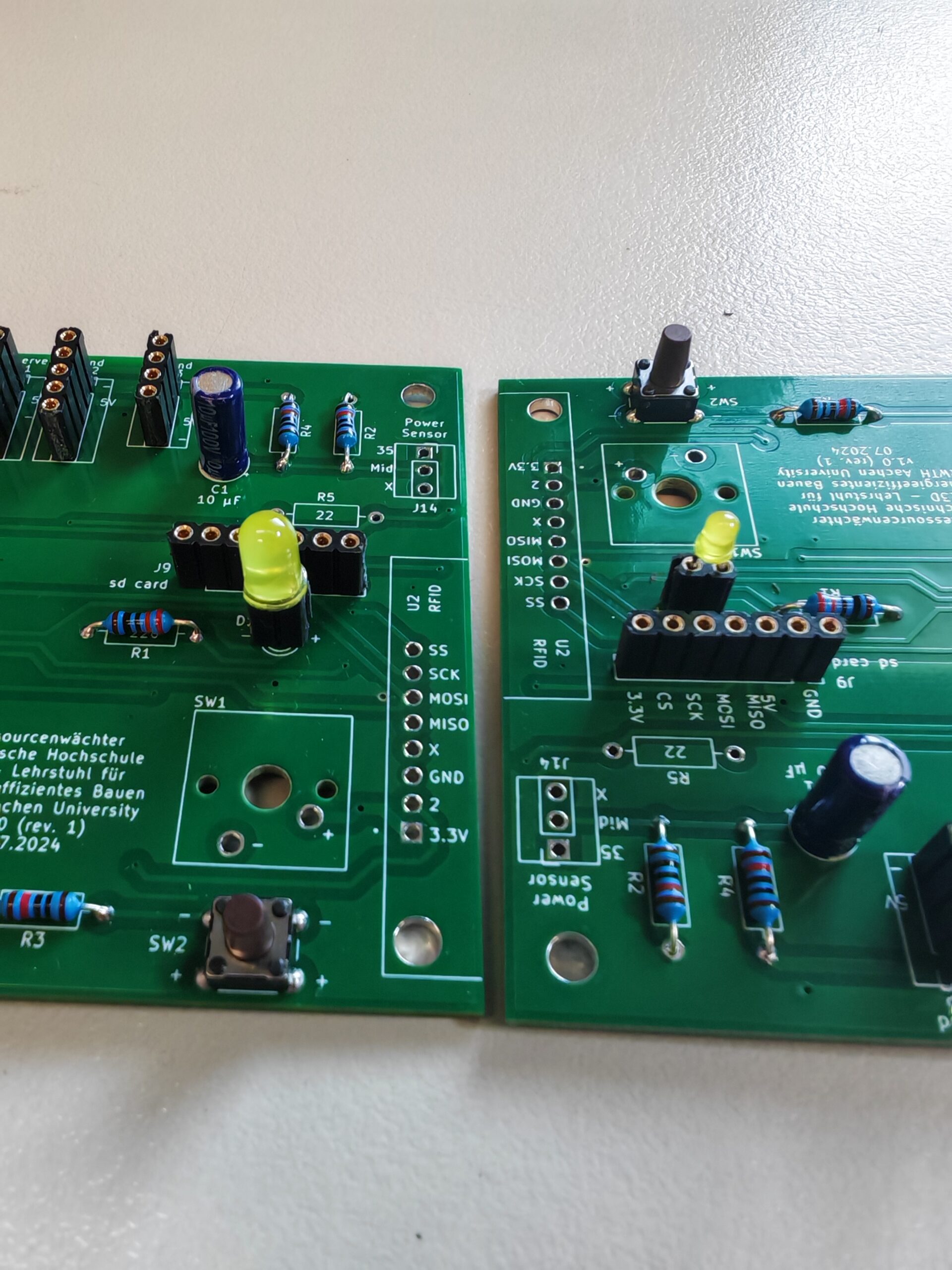
Achten Sie beim Einbau auf die positiven und negativen Stifte. Sie können die LED auch direkt auf das PCB löten, anstatt die Stiftbuchse zu verwenden.
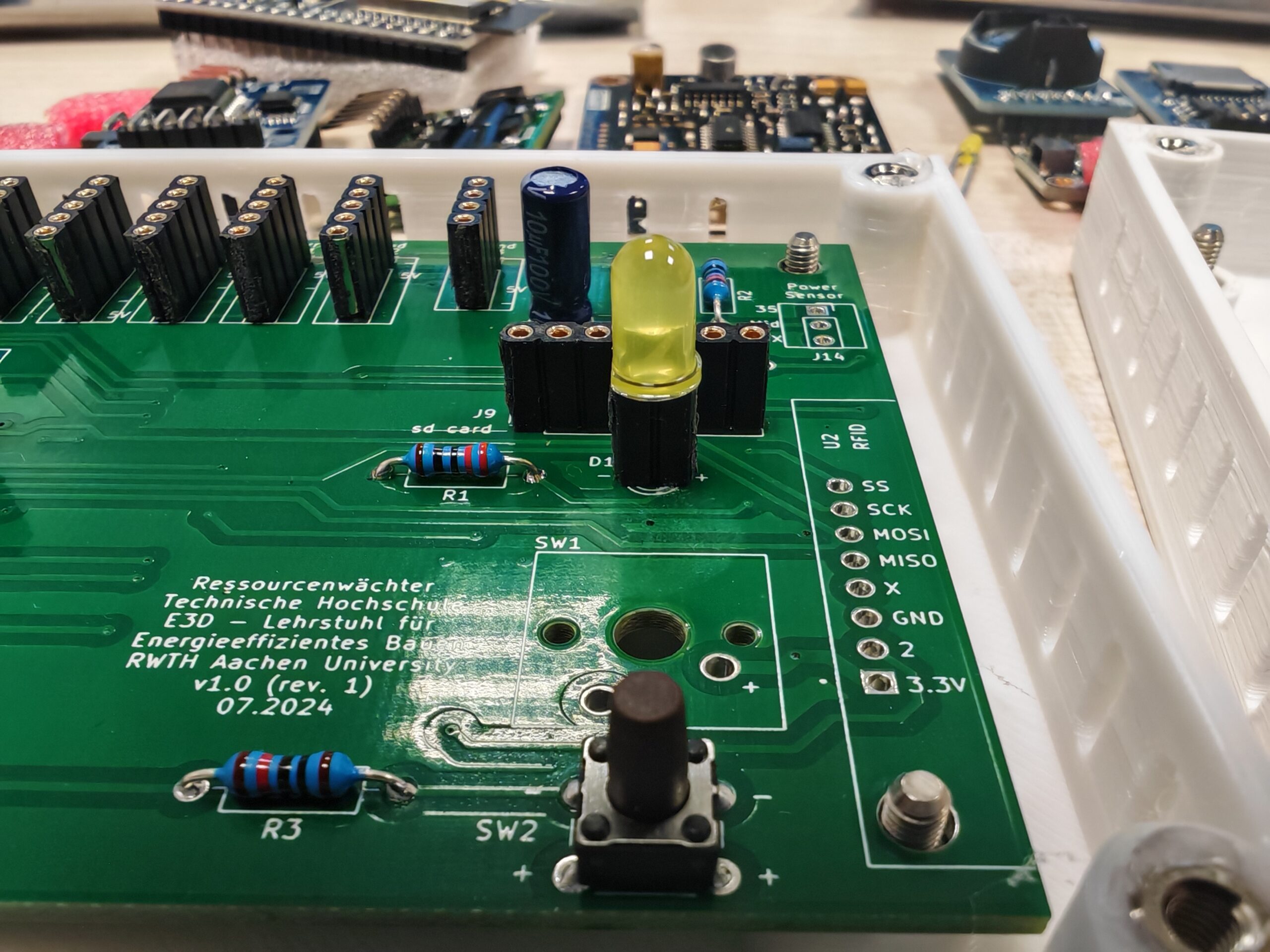
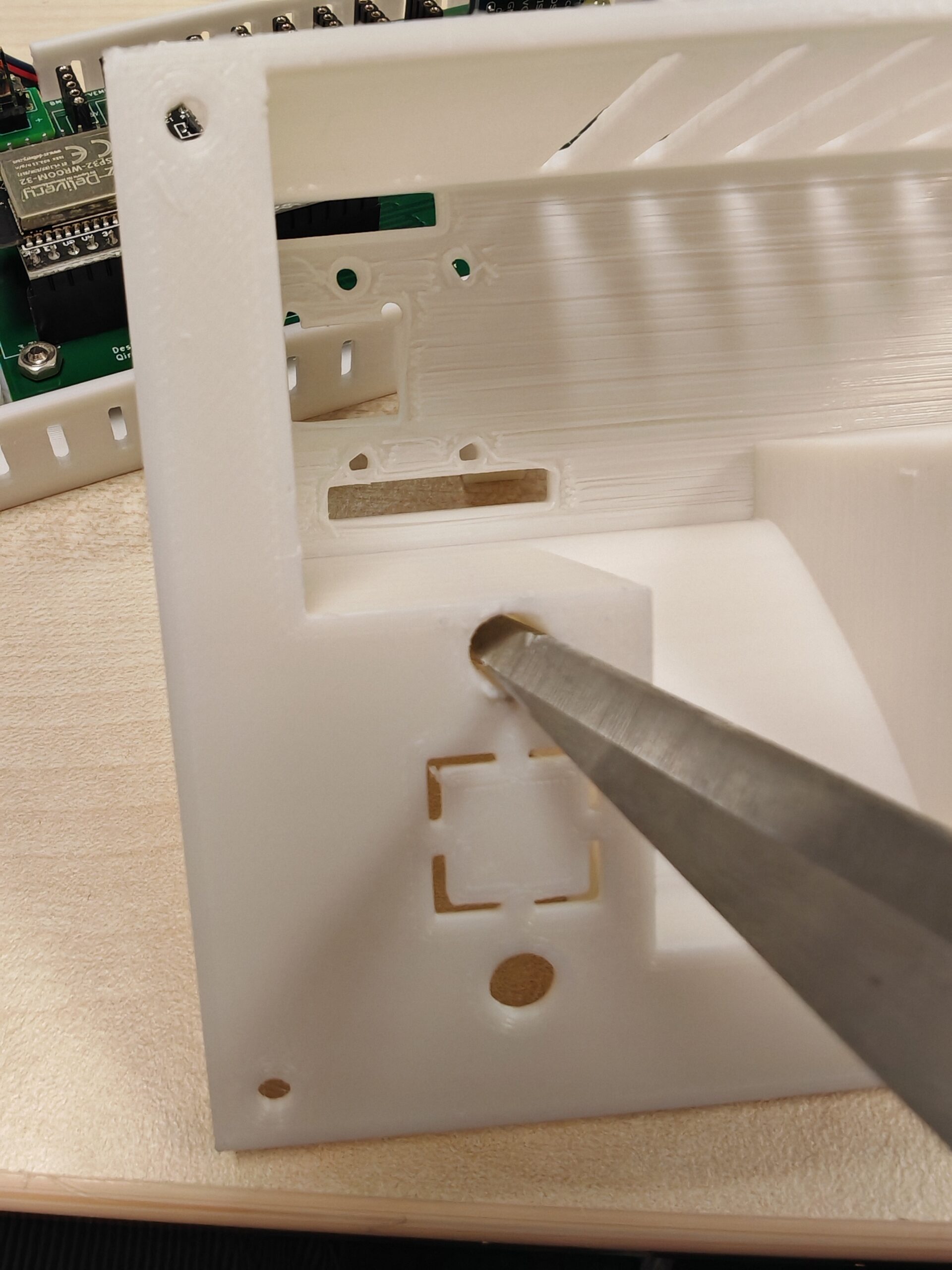
Wenn Sie eine größere LED mit Stiftsockel verwenden (hängt auch von der Höhe des Stiftsockels ab), wie links im Bild unten gezeigt, benötigen Sie eventuell eine Schere oder ein anderes Werkzeug, um das LED-Loch im Gehäuse entsprechend zu vergrößern. Wenn Sie einen Tastaturschalter (SW1) anstelle des Tasters (SW2) im Bild unten gewählt haben, verwenden Sie ein Werkzeug, um die entsprechende rechteckige Öffnung im Gehäuse zu öffnen.
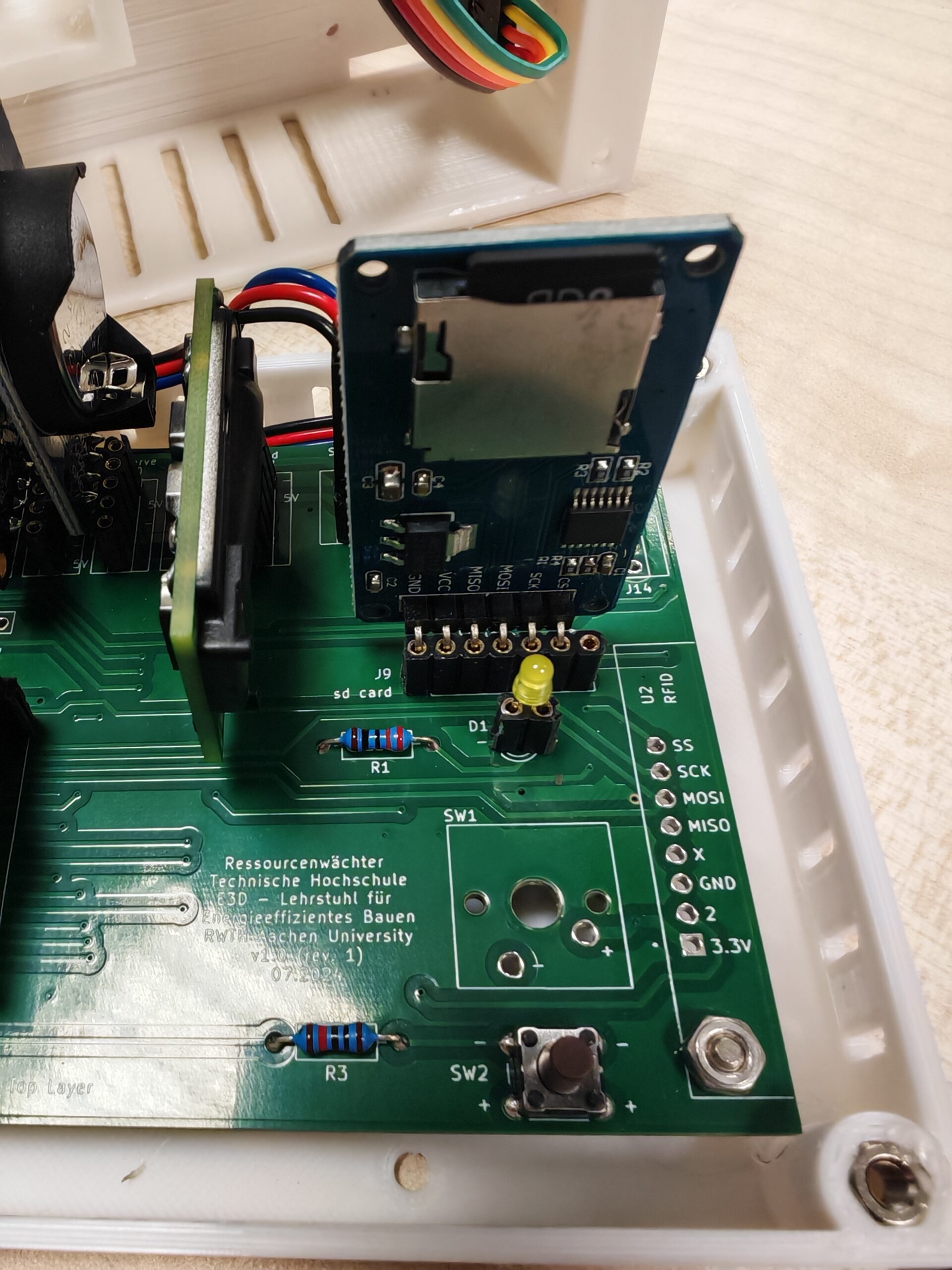
2. Installation der SD-Karte und des RTC-Moduls
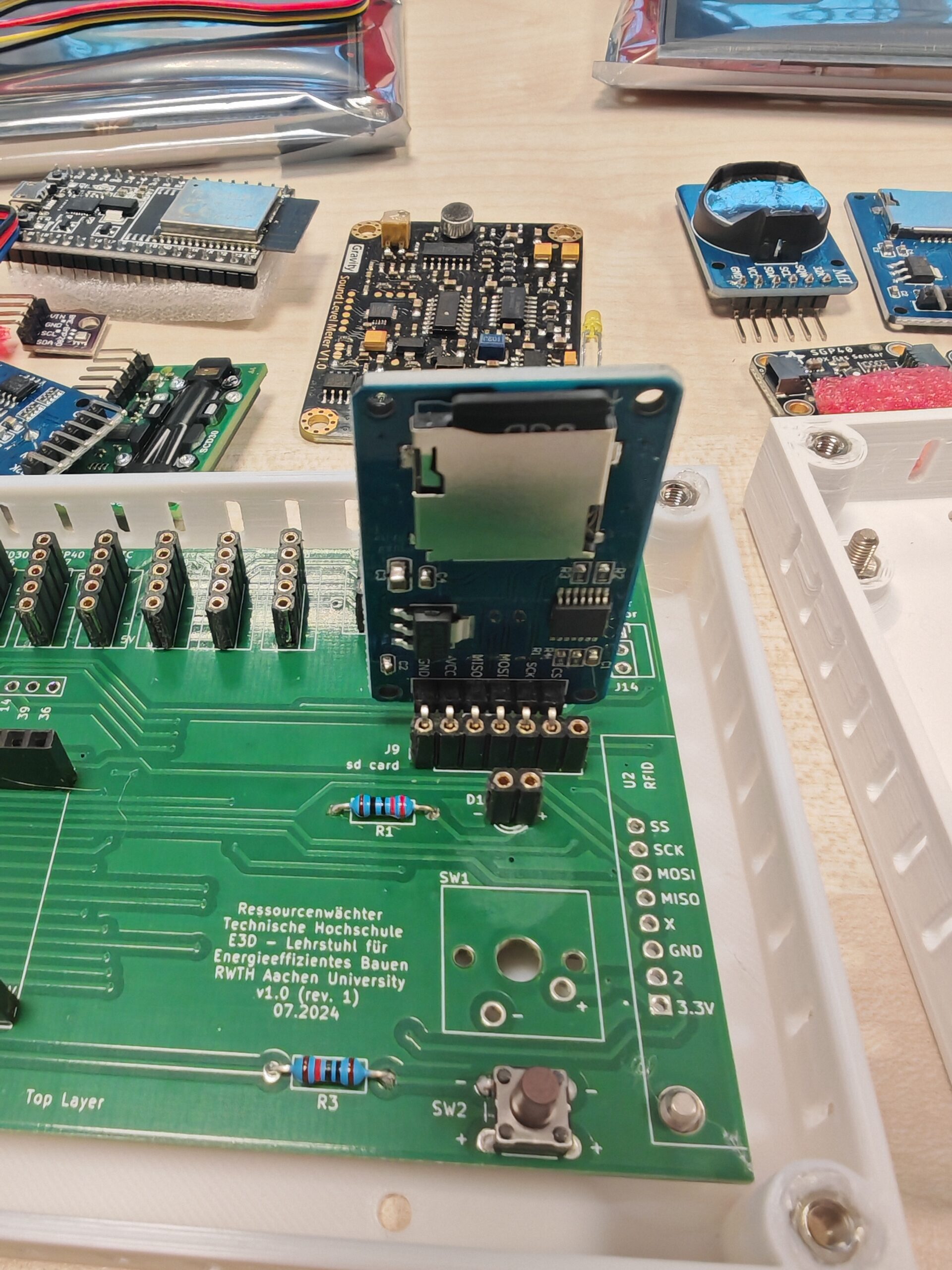
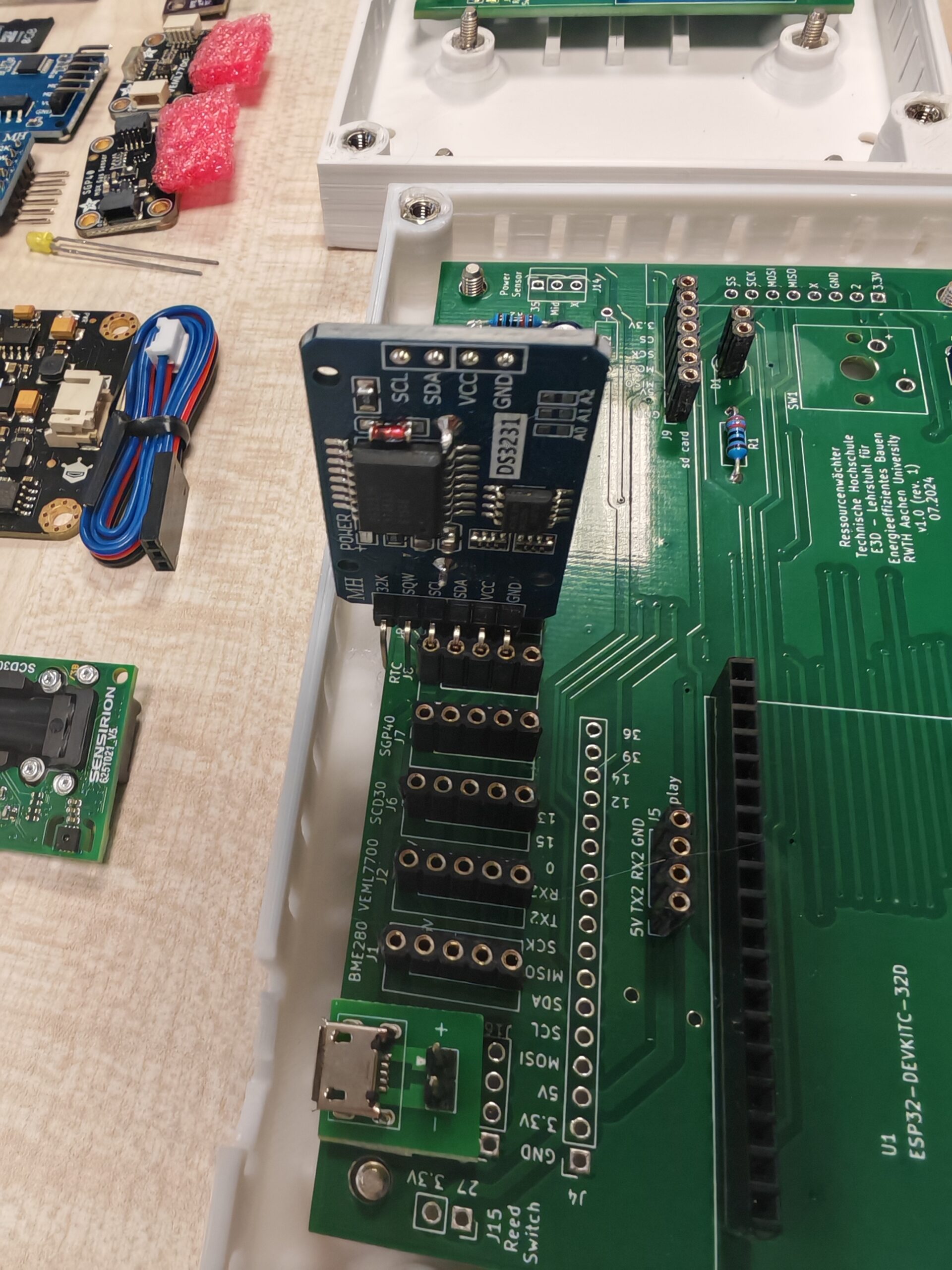
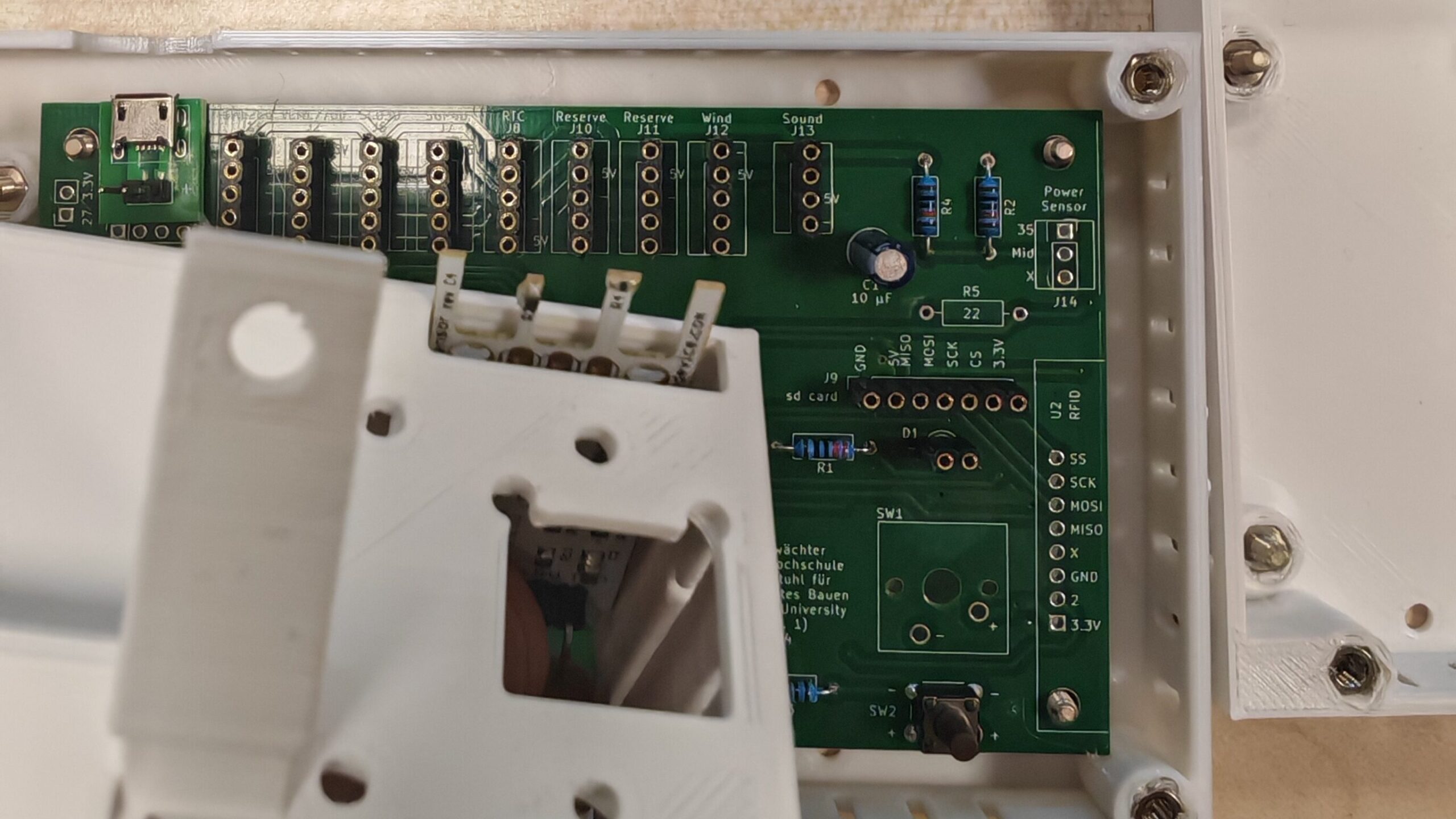
Stecken Sie die SD-Karte und das RTC-Modul entsprechend den Leiterplattenabdrücken in die Stiftleiste (siehe Abbildung unten). Beachten Sie, dass das RTC-Modul eine separate Stromversorgung über eine Knopfzellenbatterie benötigt. Wenn das von Ihnen erworbene RTC-Modul nicht mit einer Batterie geliefert wird, müssen Sie eine solche separat erwerben.
3. Installation von Mikrocontroller und Sensoren
Stecken Sie die Sensoren entsprechend den Leiterplattenabdrücken (PCB footprints) in die Stiftsockel.
3.1 DFROBOT SEN0232 Gravity Analog Sound Level Meter
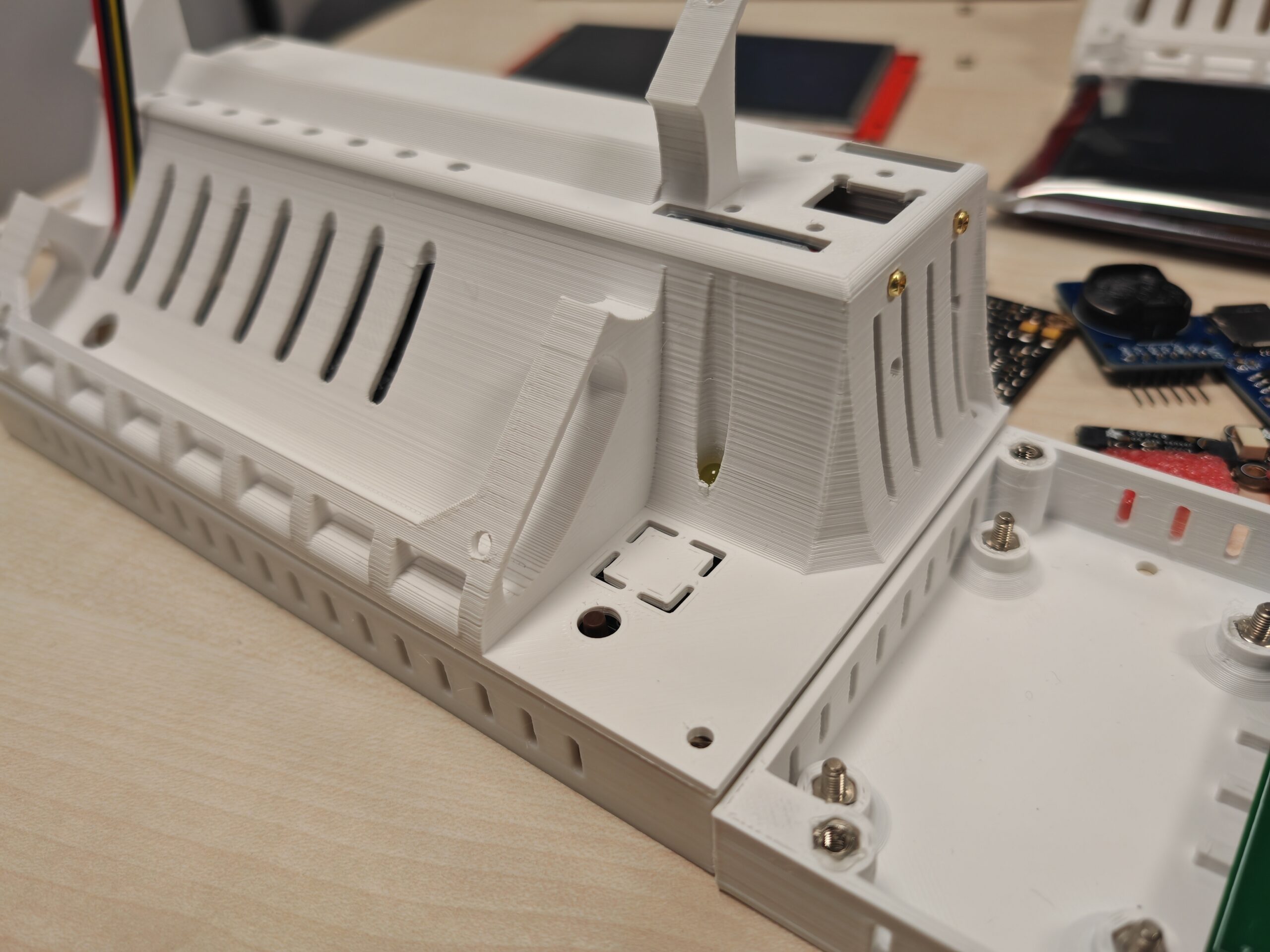
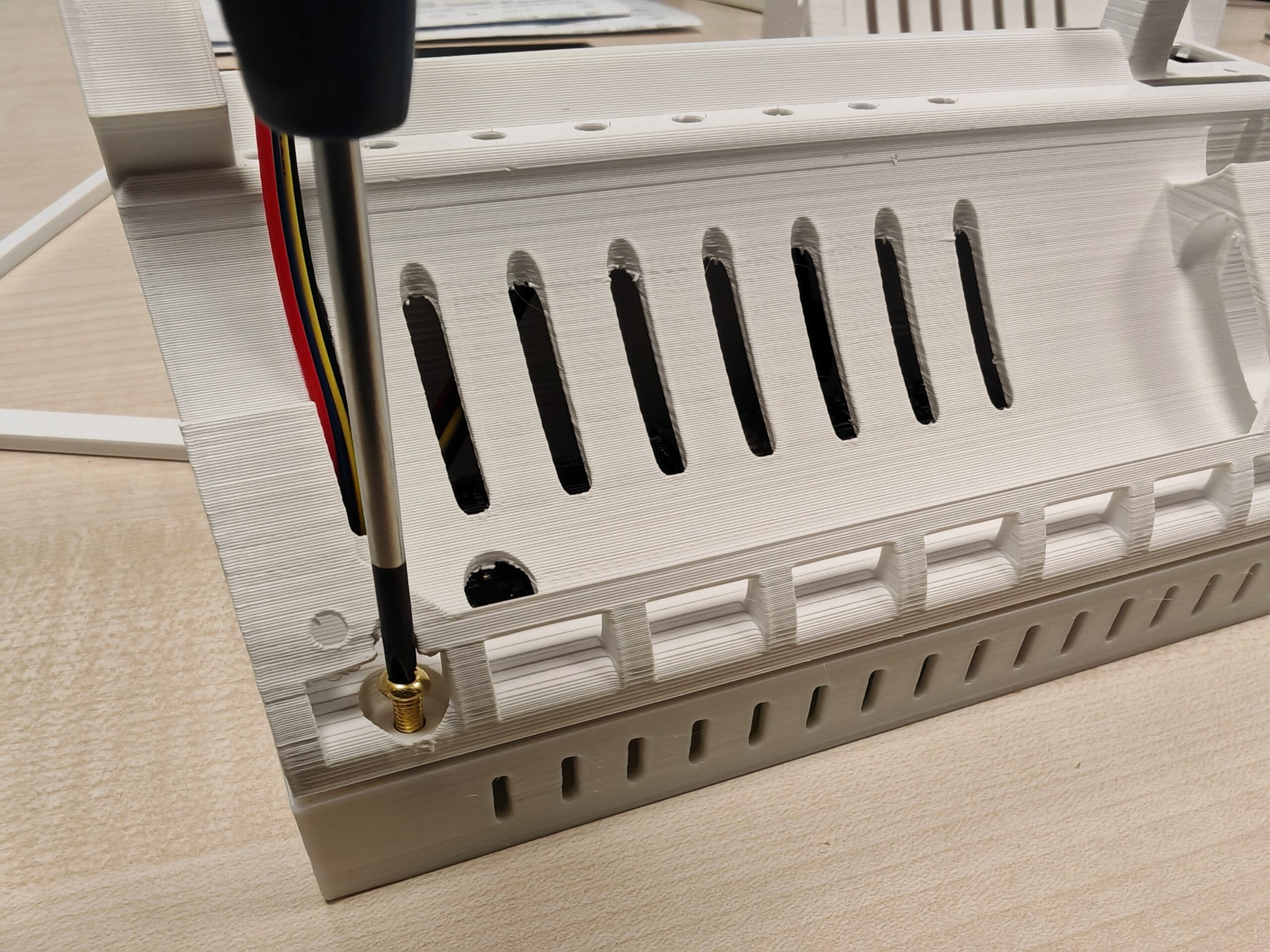
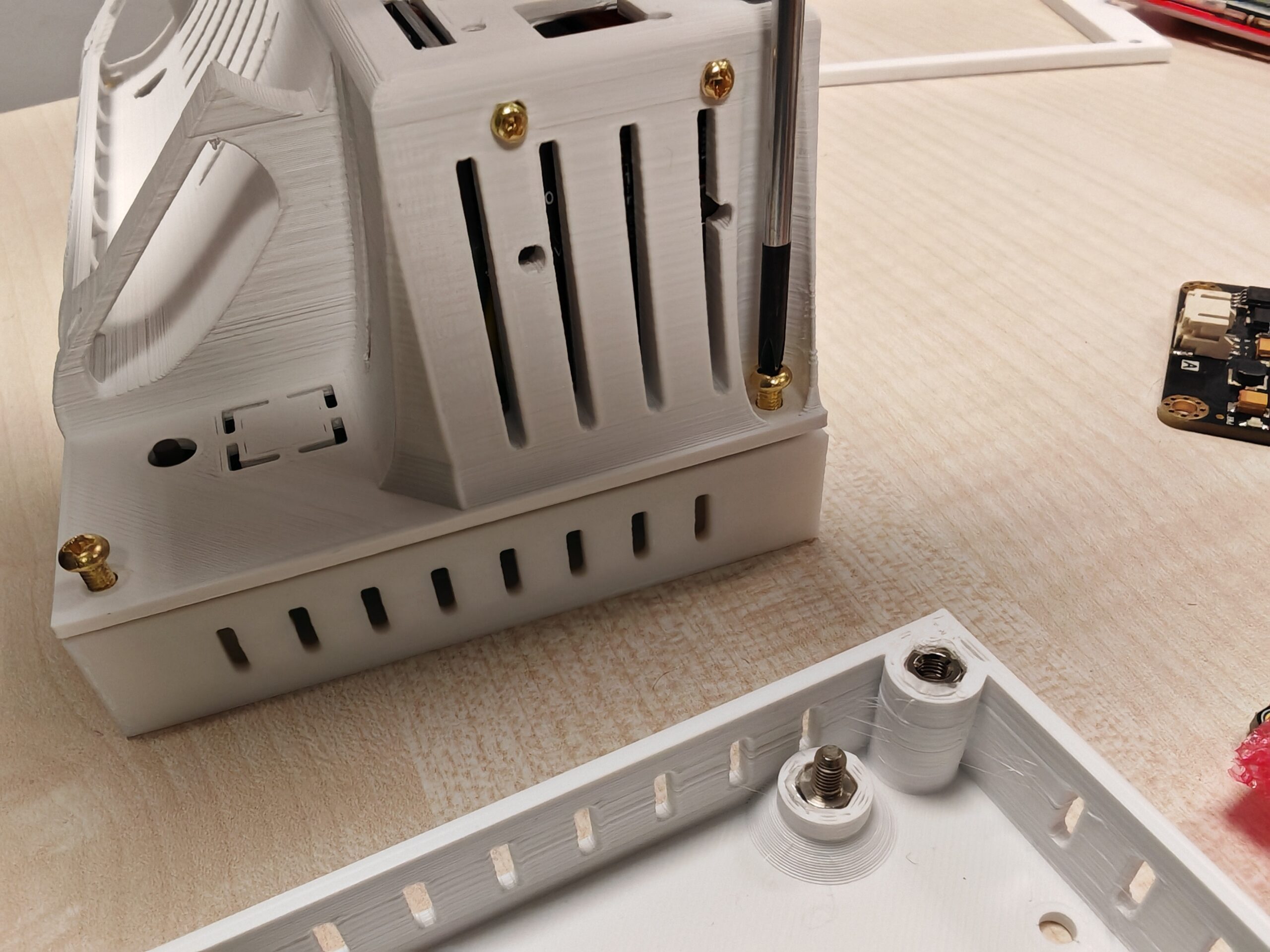
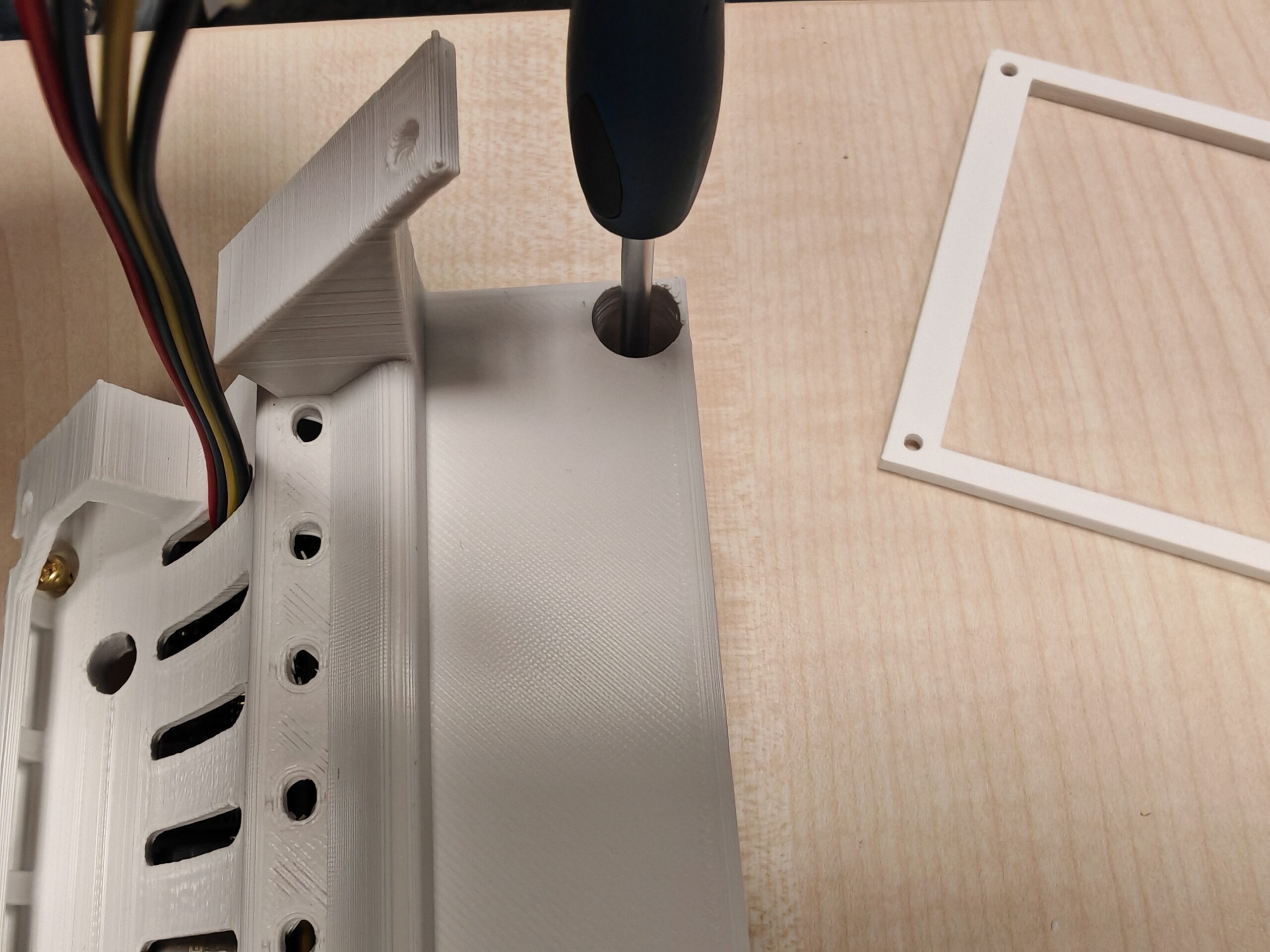
Befestigen Sie nach dem Einbau den SEN0232 und das PCB mit den Sechskantmuttern am Gehäuseboden.
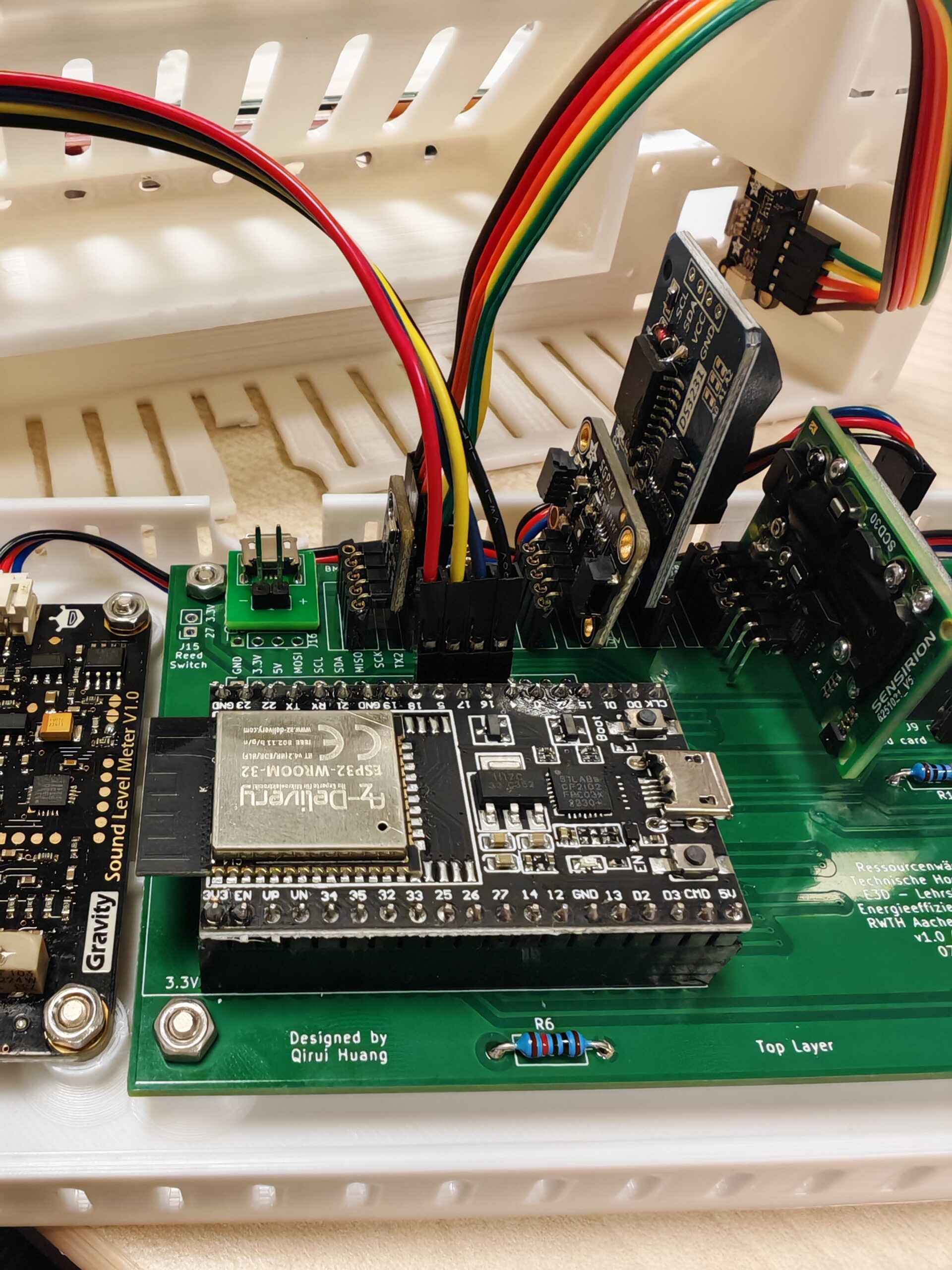
3.2 Mikrocontroller
Installieren Sie den Mikrocontroller wie unten gezeigt.
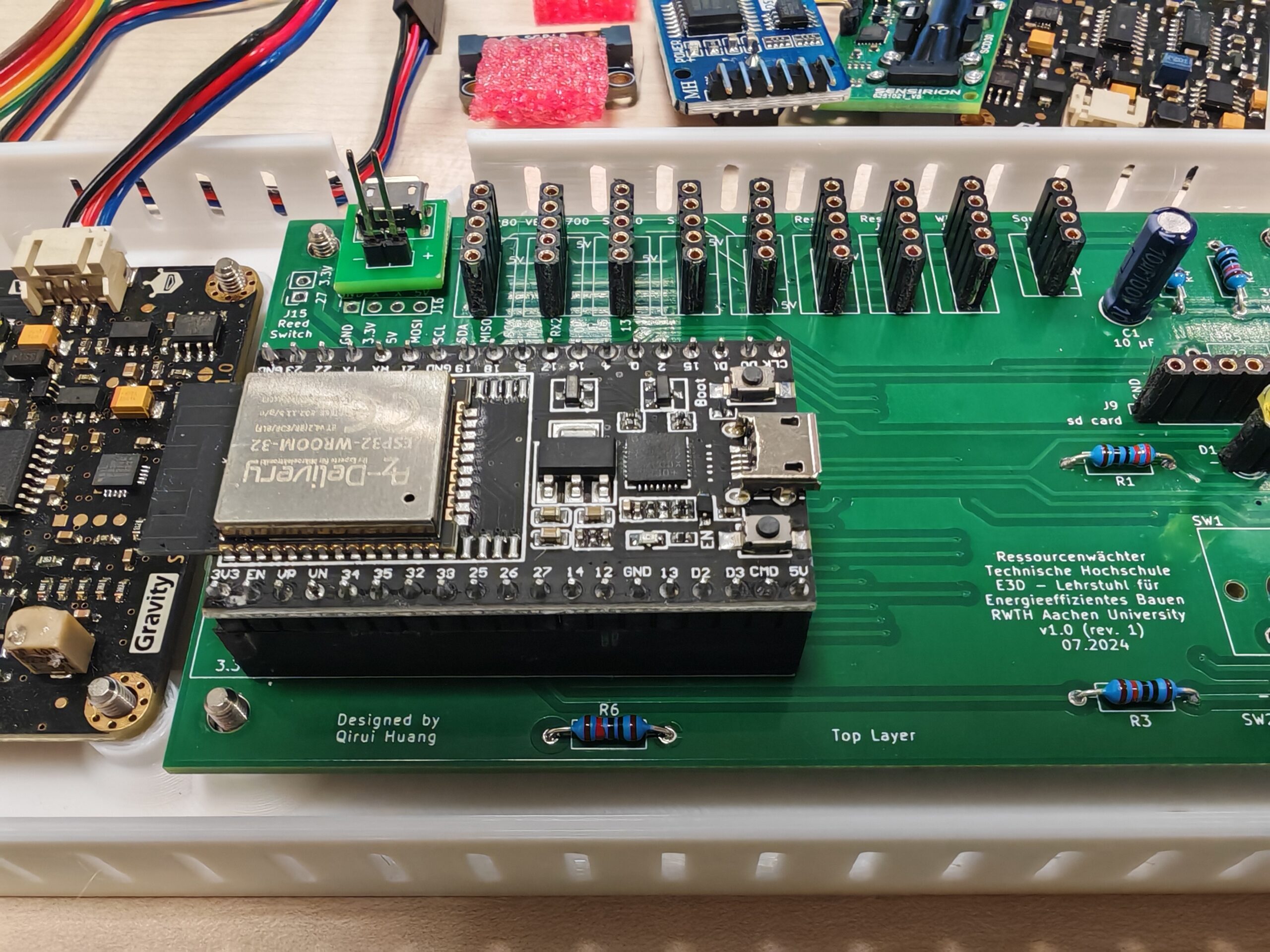
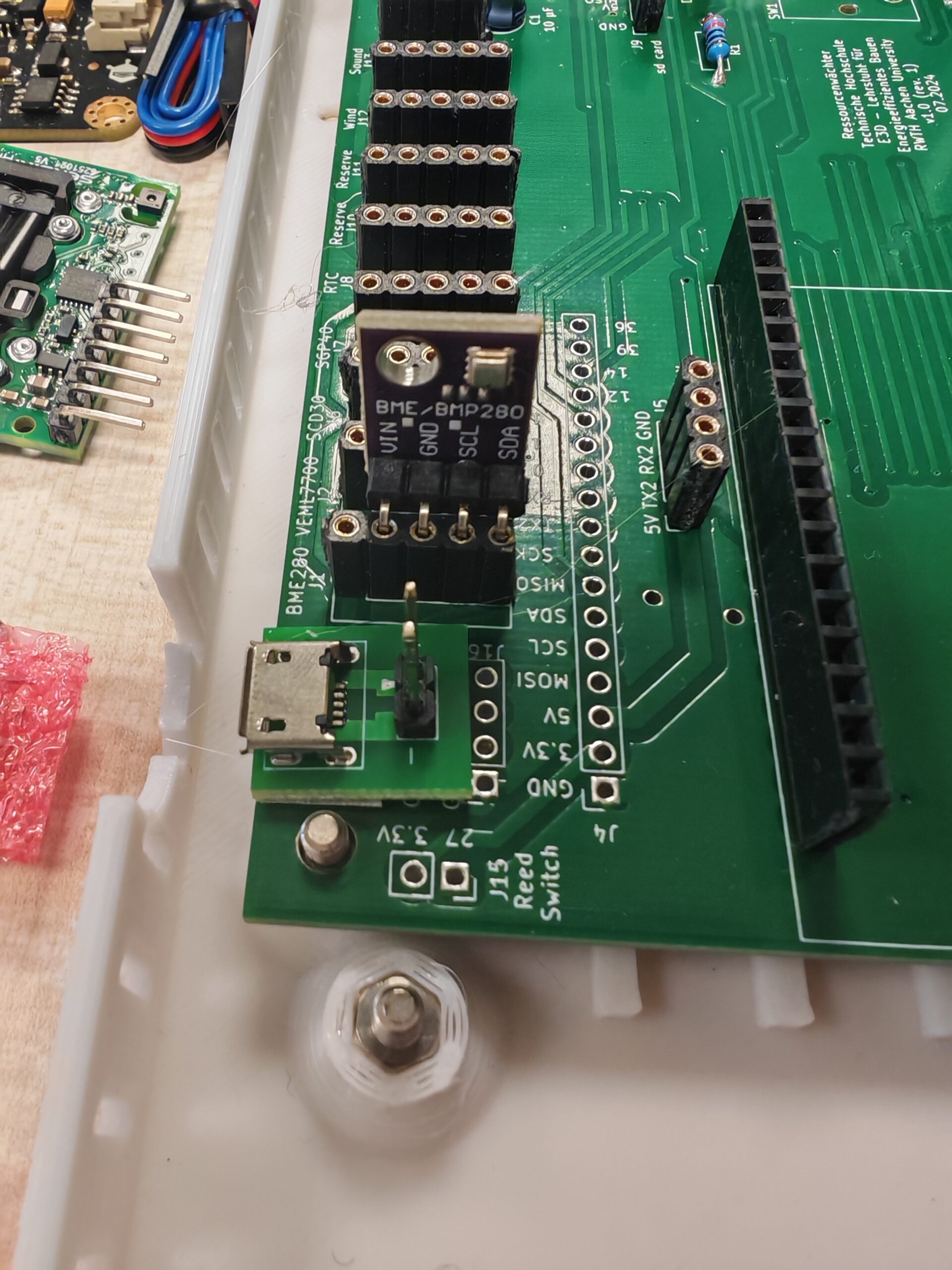
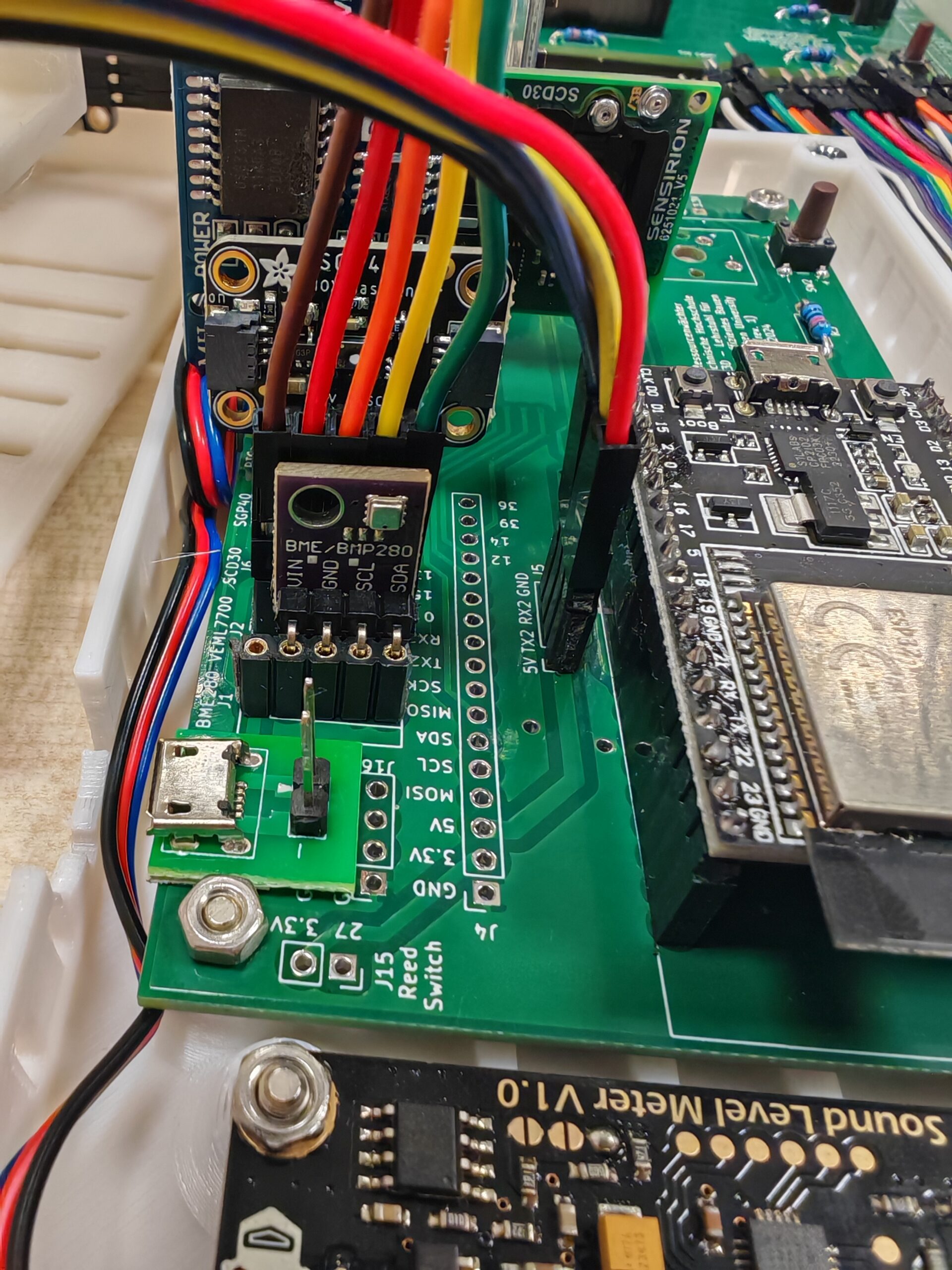
3.3 BME280 & SGP40
Die BME- und SGP-Sensoren können ohne Überbrückungsdrähte direkt auf die Stiftleiste gesteckt werden.

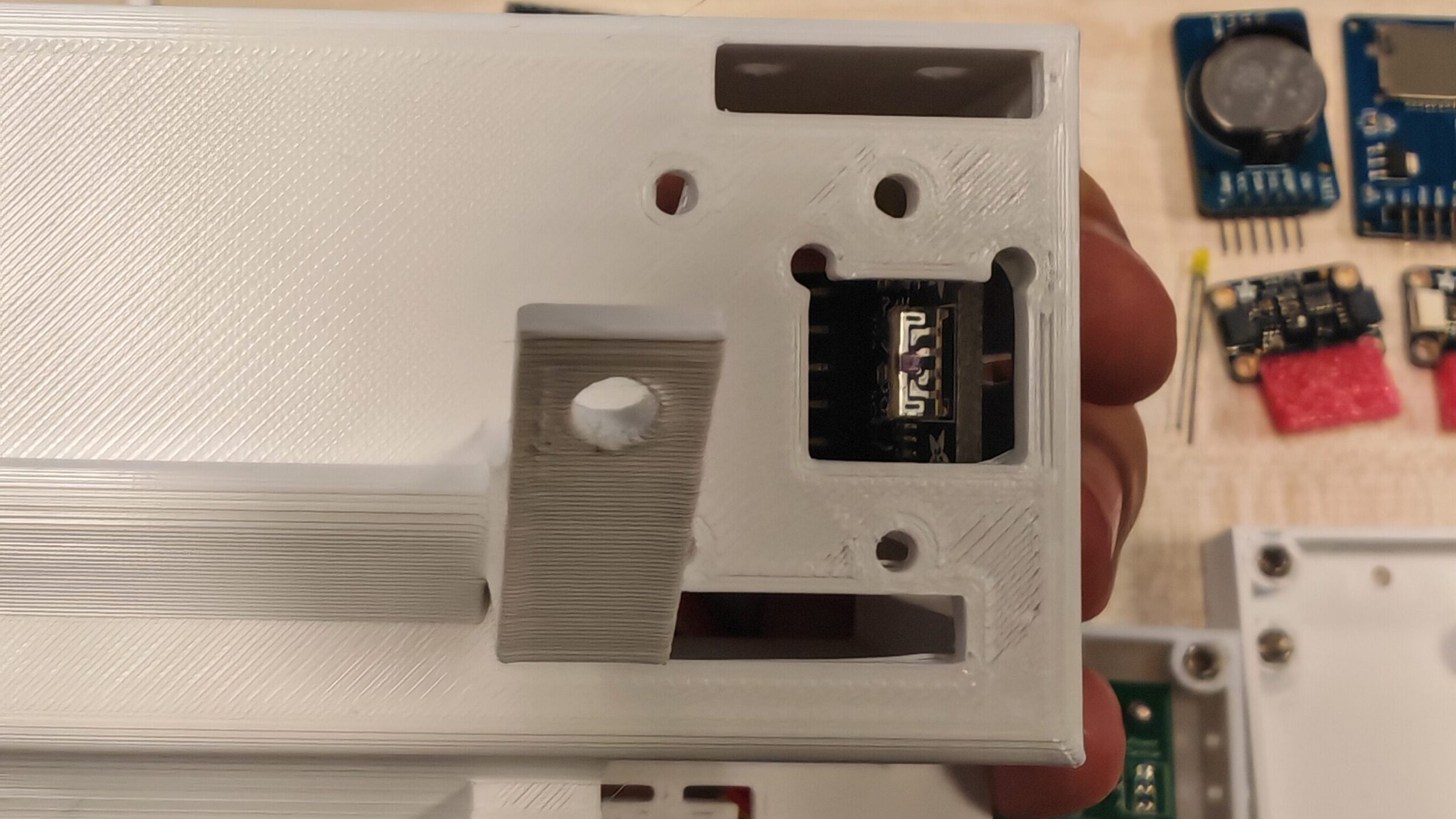
3.4 VEML 7700
Das VEML7700 muss in die dafür vorgesehene Öffnung im Gehäuse eingebaut werden. Bei der Konstruktion des Gehäuses haben wir mehrere Befestigungslöcher vorgesehen, um es so kompatibel wie möglich mit verschiedenen VEML7700-Typen zu machen.
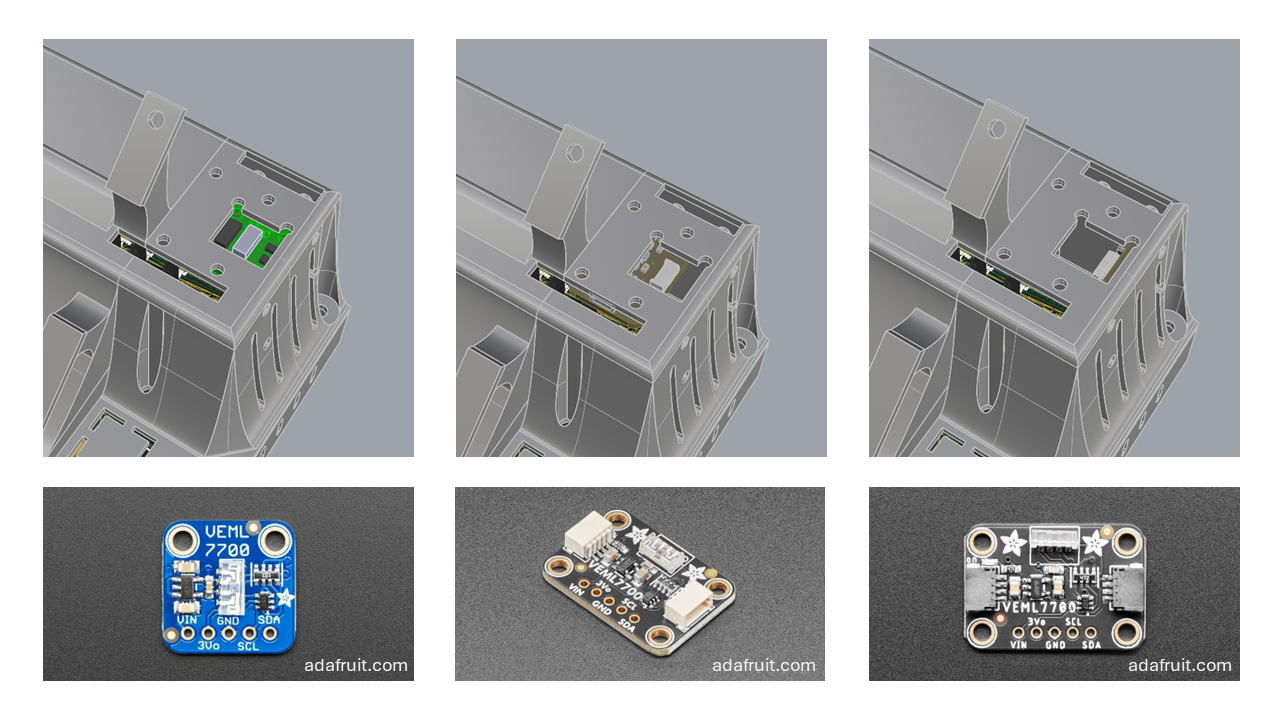
Die folgende Abbildung zeigt ein Beispiel für die Installation der 90-Grad-Winkelversion des VEML7700-Entwicklungsboards von Adafruit.
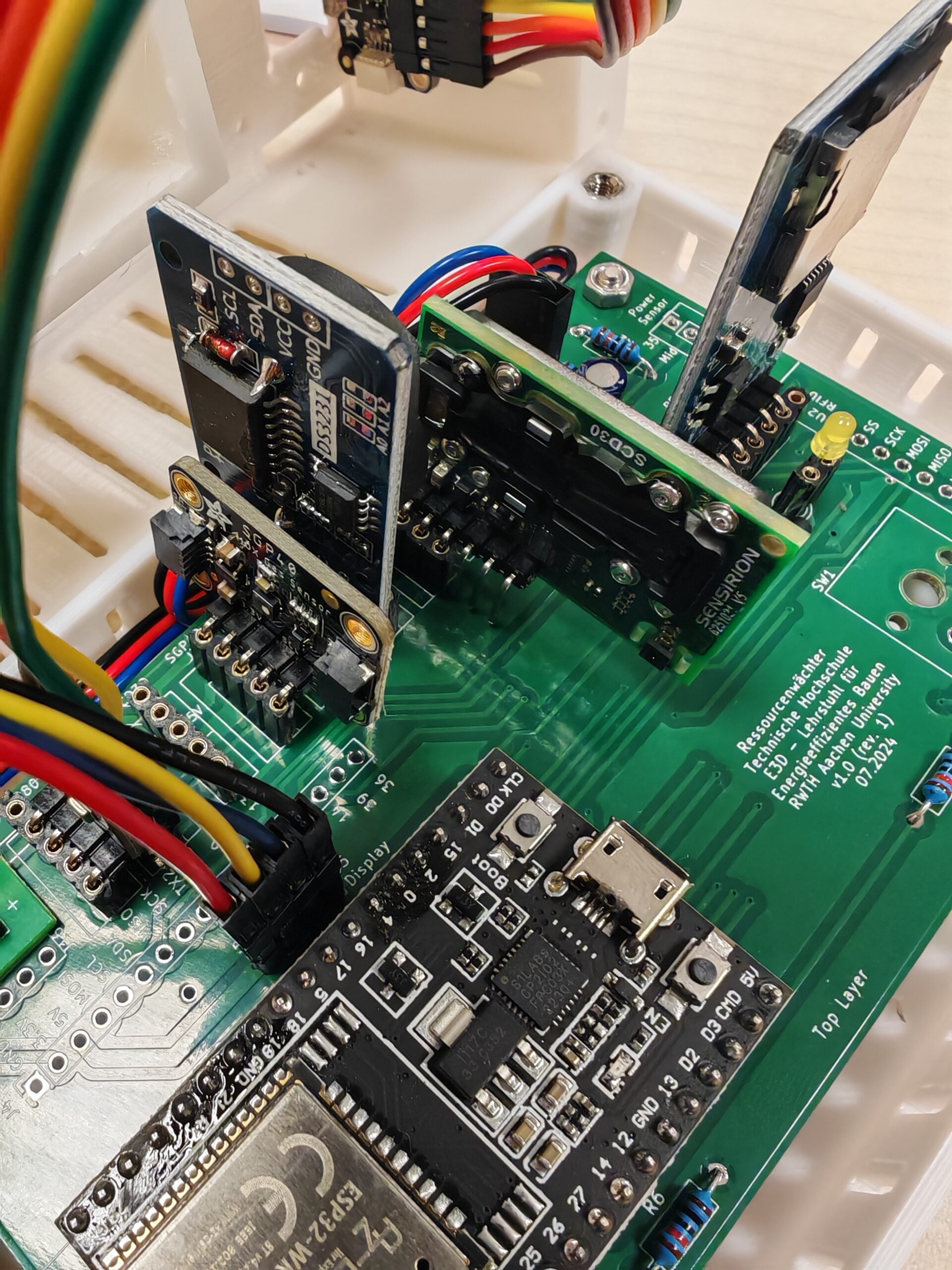
3.5 SCD30
Für den CO2-Sensor SCD30 können Sie den Sensor gemäss Sensirion-Richtlinien in den Öffnungen auf der Gehäuserückseite befestigen und Überbrückungsdrähte verwenden oder ihn direkt in die I2C-Stift-Buchse auf der Leitplatte stecken (Reserve J10 oder J11, wie unten gezeigt).
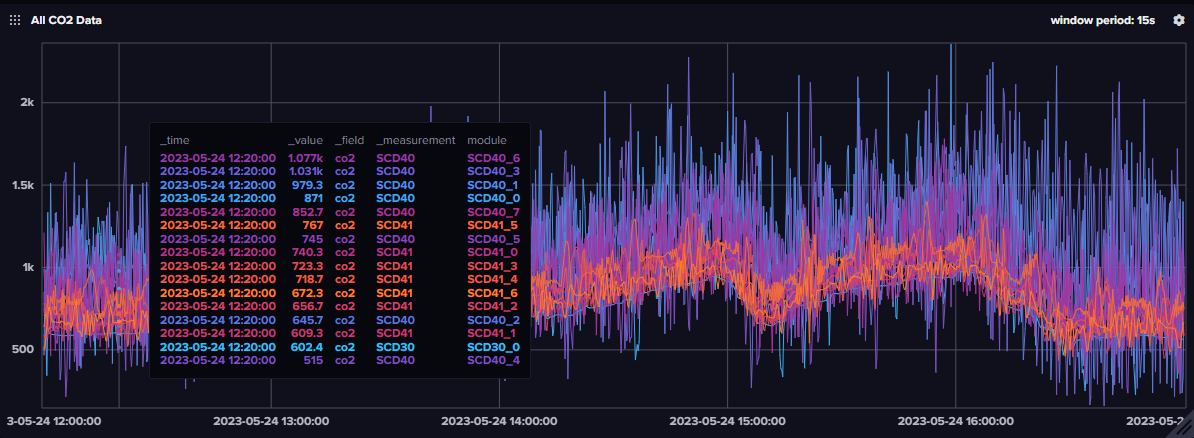
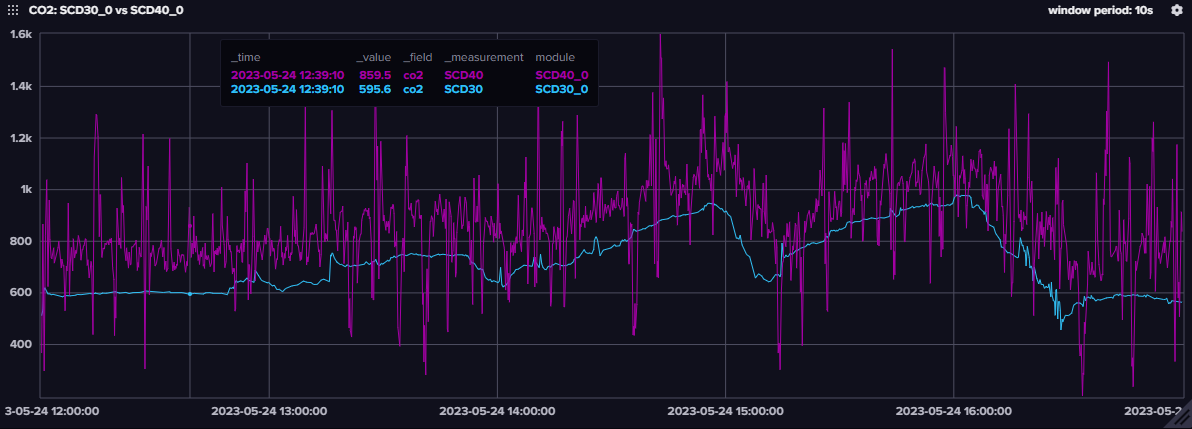
Sensirion bietet auch einen anderen kleineren CO2-Sensor an: den SCD40/41, der ein anderes Detektionsprinzip (photoakustisches NDIR) als der SCD30 verwendet. Unsere früheren Tests haben jedoch gezeigt, dass dieser Sensor zwar ebenfalls genau ist, aber in Bezug auf die Datenstabilität schlechter abschneidet (siehe unten), was vielleicht daran liegt, dass er nicht wie der SCD30 über einen Doppelkanal verfügt. Wenn Sie den SCD4x verwenden, empfehlen wir die Verwendung von Durchschnittsabtastungen oder gleitenden Durchschnitten, um die Datendrift zu verringern.
3.6 Wind Sensor Rev. C
Befestigen Sie den Windgeschwindigkeitssensor wie in der Abbildung unten gezeigt und verbinden Sie ihn mit Hilfe von Überbrückungsdrähten mit der entsprechenden Stiftleiste auf das PCB.
Anmerkung: Aufgrund der begrenzten Genauigkeit von preisgünstigen Windgeschwindigkeitssensoren haben wir uns entschieden, diese in unserer Feldstudie nach den Tests nicht zu verwenden, um zu vermeiden, dass die Nutzer einen größeren Fehler bei der Bewertung des thermischen Komforts machen. Teurere Anemometer (Windsensor Rev. P) desselben Herstellers schnitten in unseren Tests besser ab als Rev. C, waren aber immer noch unvollkommen (insbesondere bei niedrigen Windgeschwindigkeiten). Beide Modelle erforderten eine individuelle und aufwändige Kalibrierung. Wenn Sie Rev. P verwenden möchten, müssen Sie außerdem ein DC-Wandlermodul hinzufügen, um 5V auf 12V zu erhöhen (um den Rev. P mit Strom zu versorgen) und den entsprechenden Code im Arduino-Sketch anpassen. Weitere Einzelheiten finden Sie im Tutorial zu Modern Device.
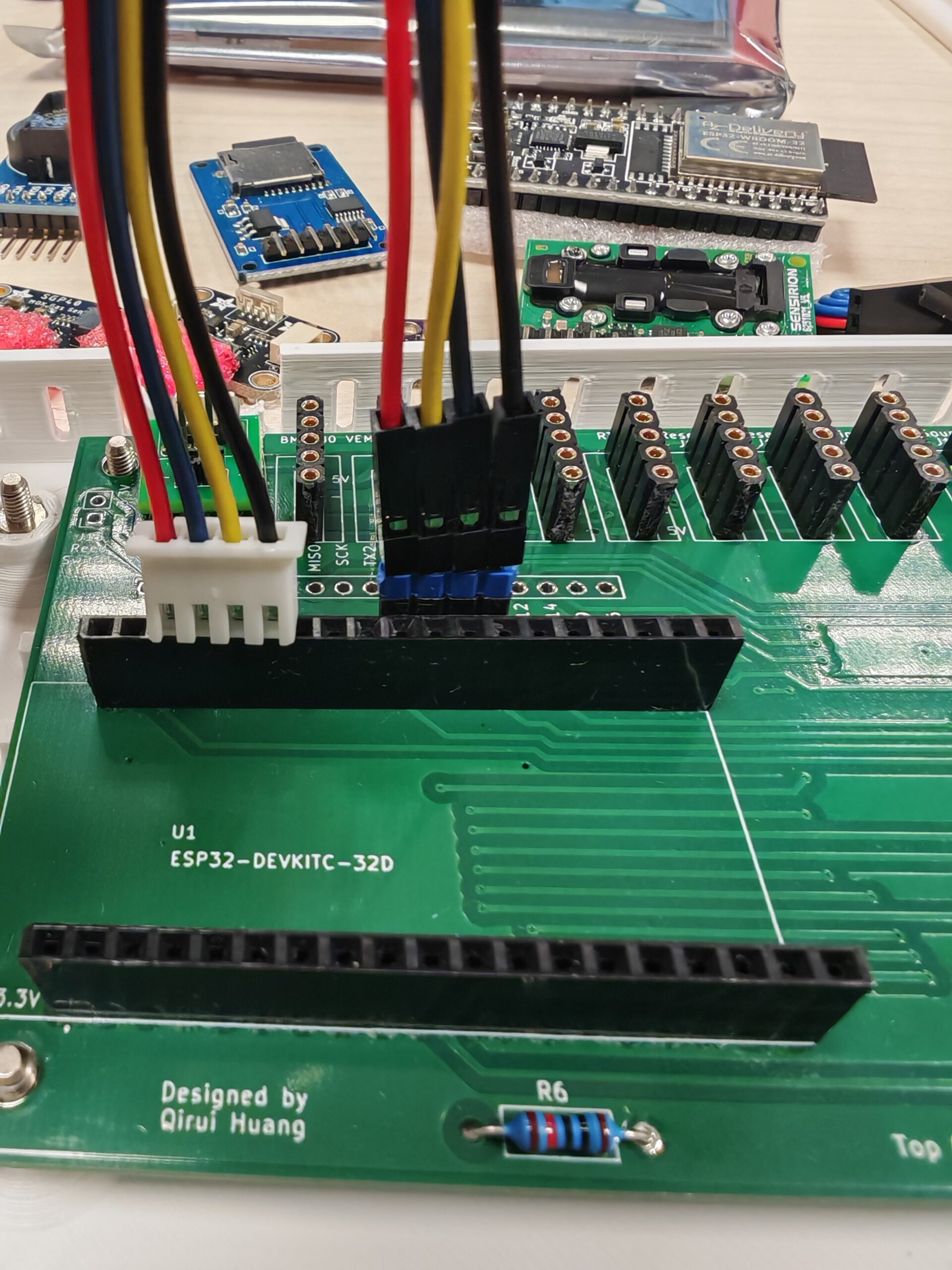
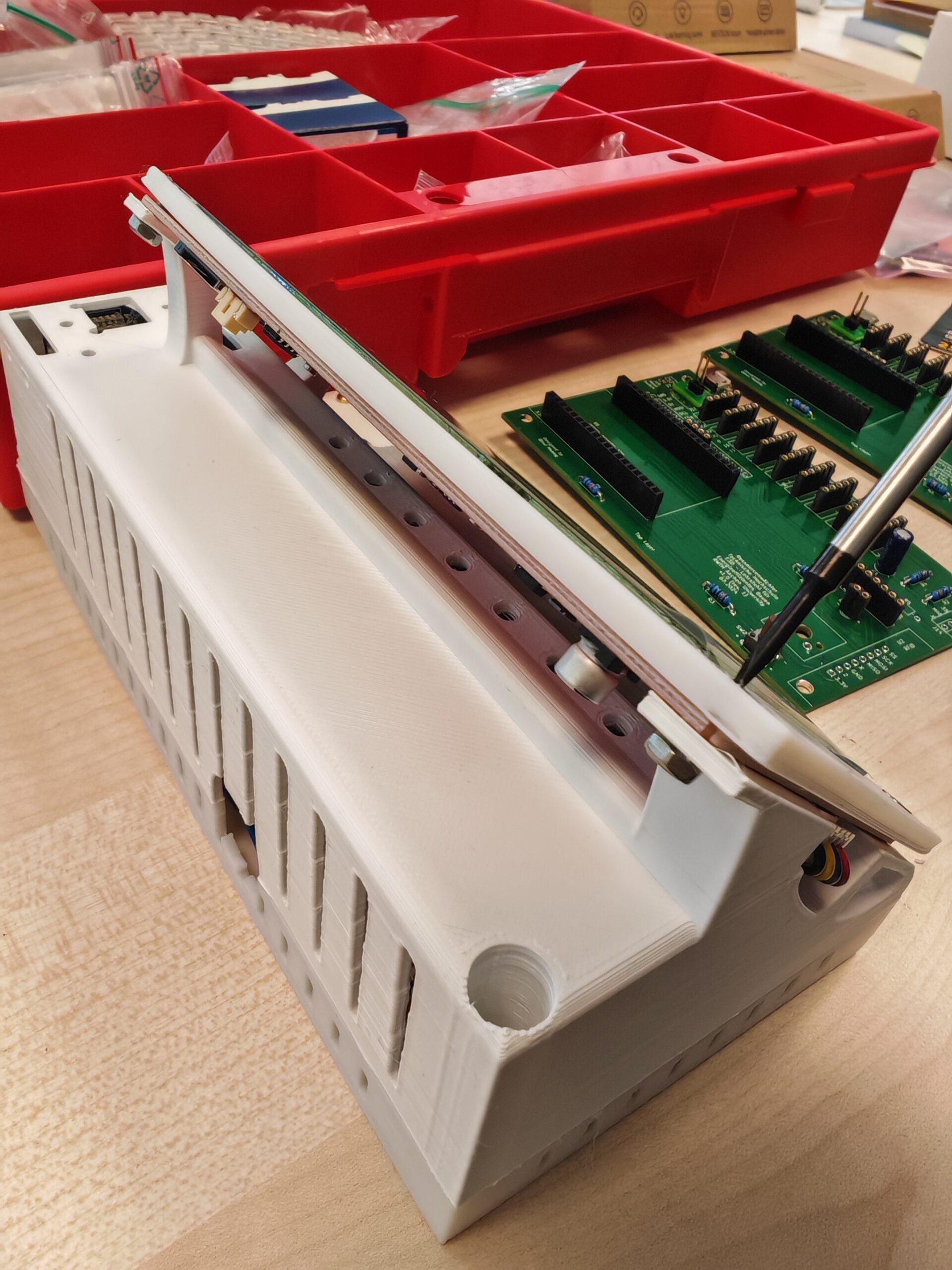
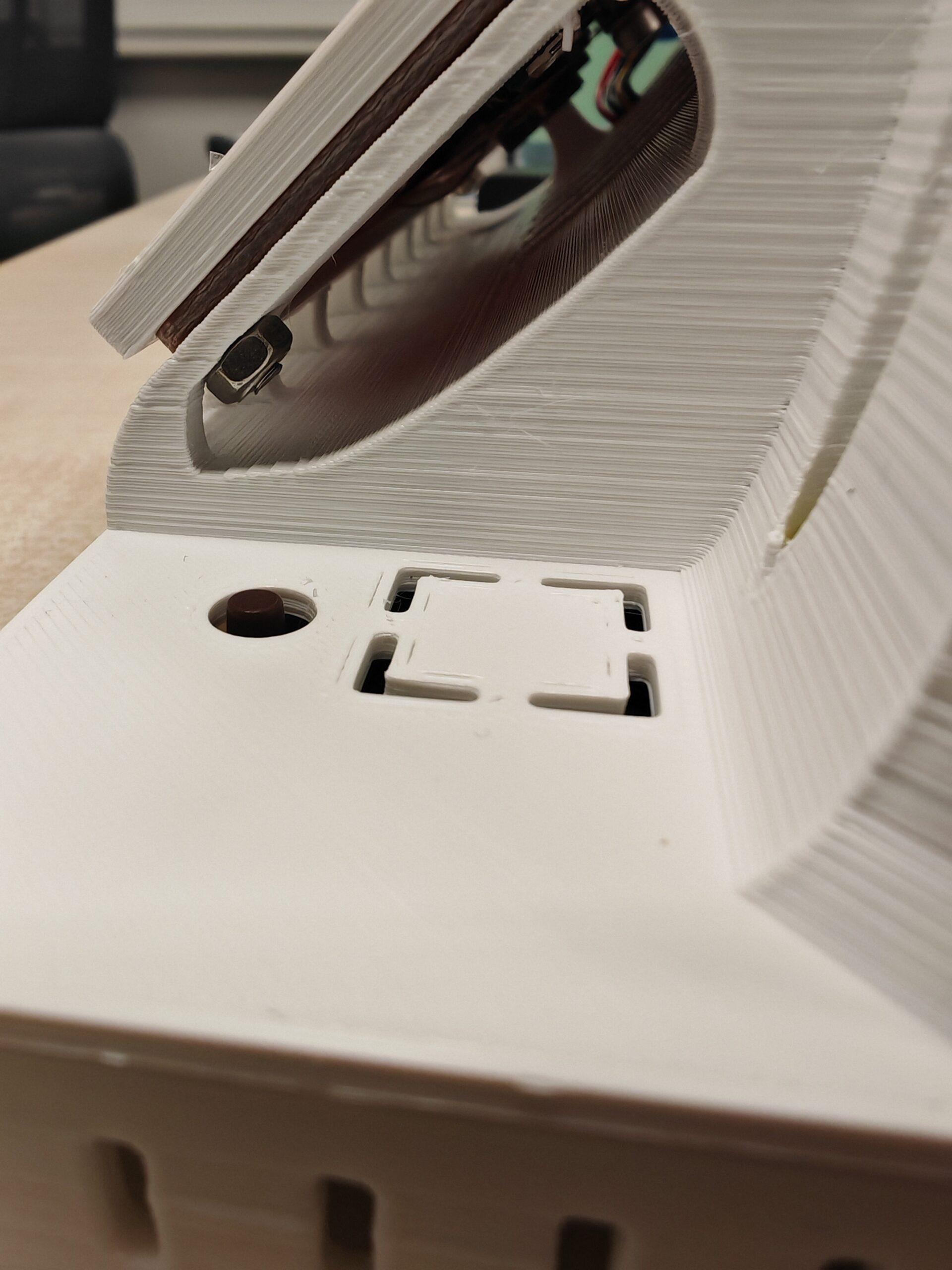
4. Anschluss an das Touch-Display
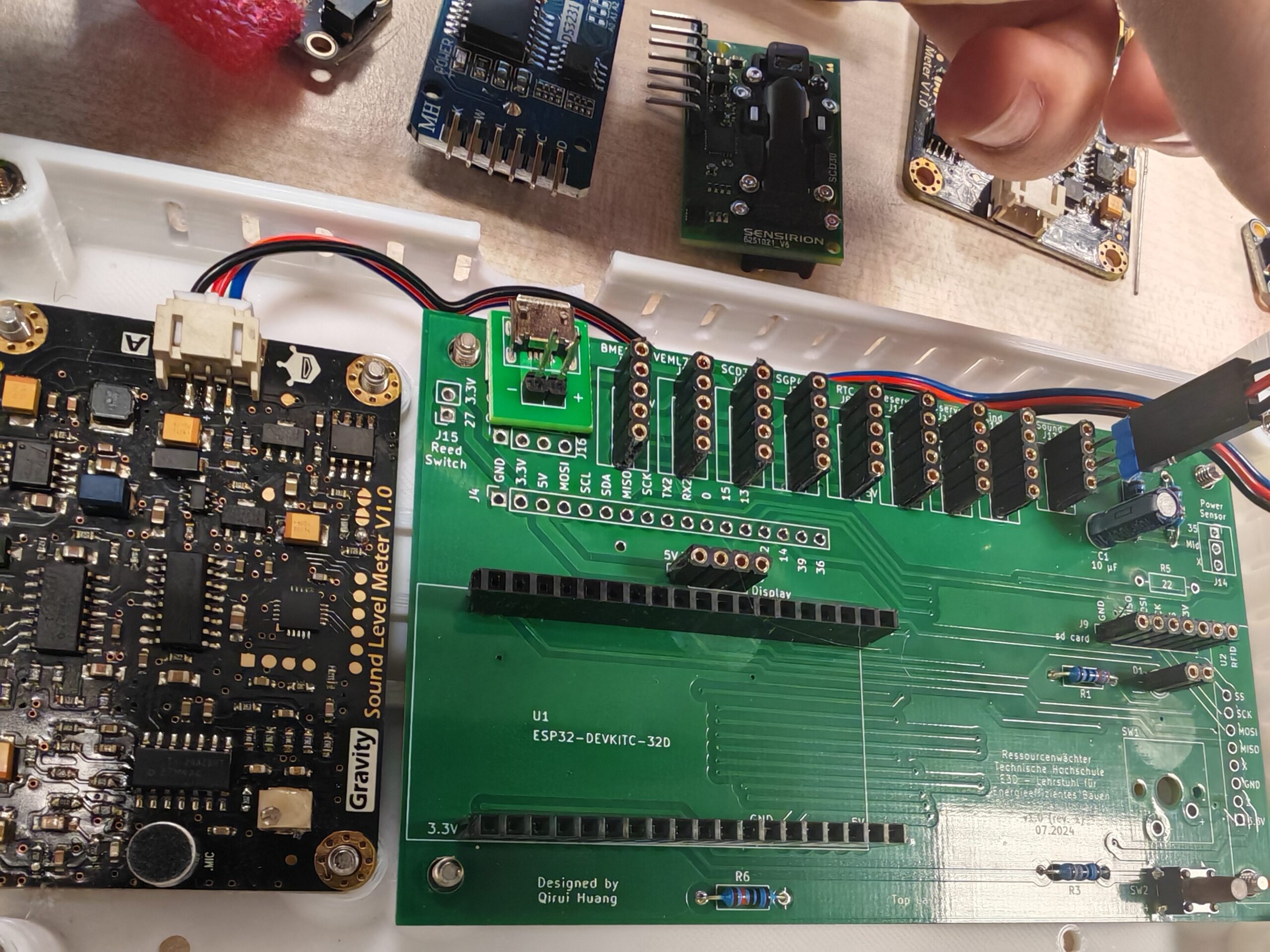
Verwenden Sie den in der Verpackung des Nextion-Displays enthaltenen Überbrückungsdraht, um den Bildschirm durch das Loch im Gehäuse mit der Stiftbuchse auf dem PCB zu verbinden. Beachten Sie, dass Sie die gelben und blauen Drähte des Überbrückungsdrahts vor dem Anschließen vertauschen müssen, wie in der Abbildung unten gezeigt. (Leider haben wir beim Entwurf des PCBs vergessen, RX und TX zu vertauschen…)

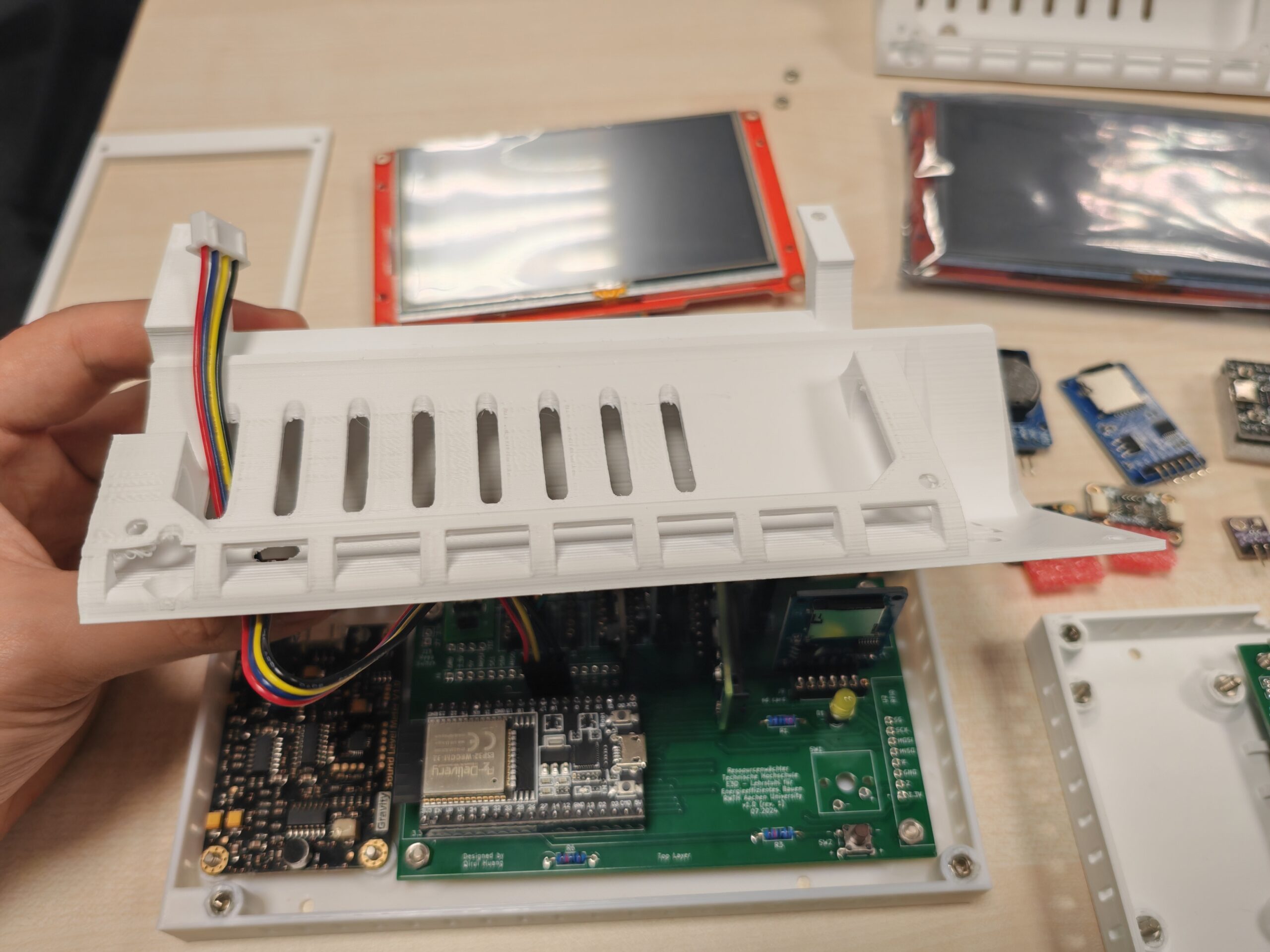
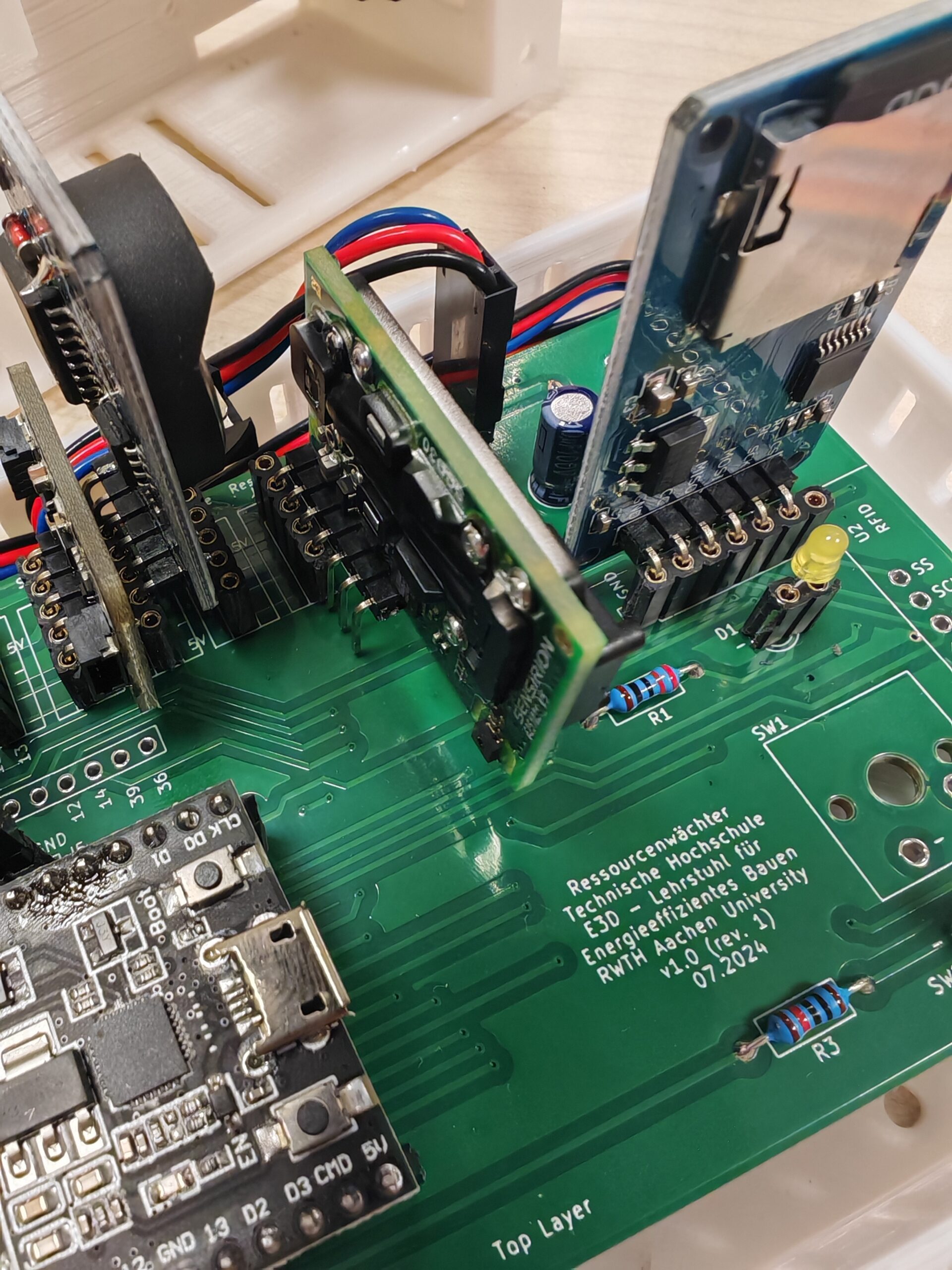
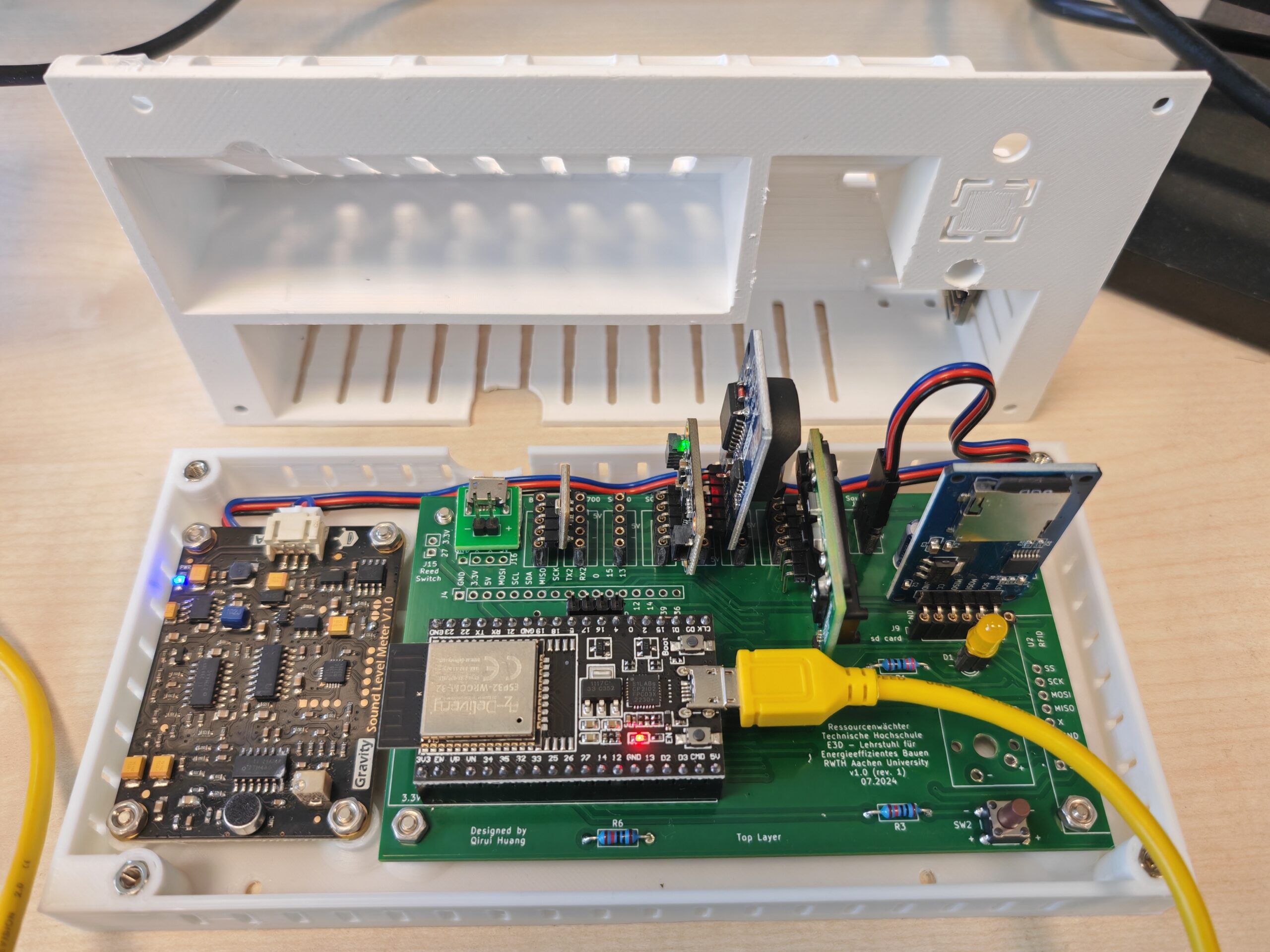
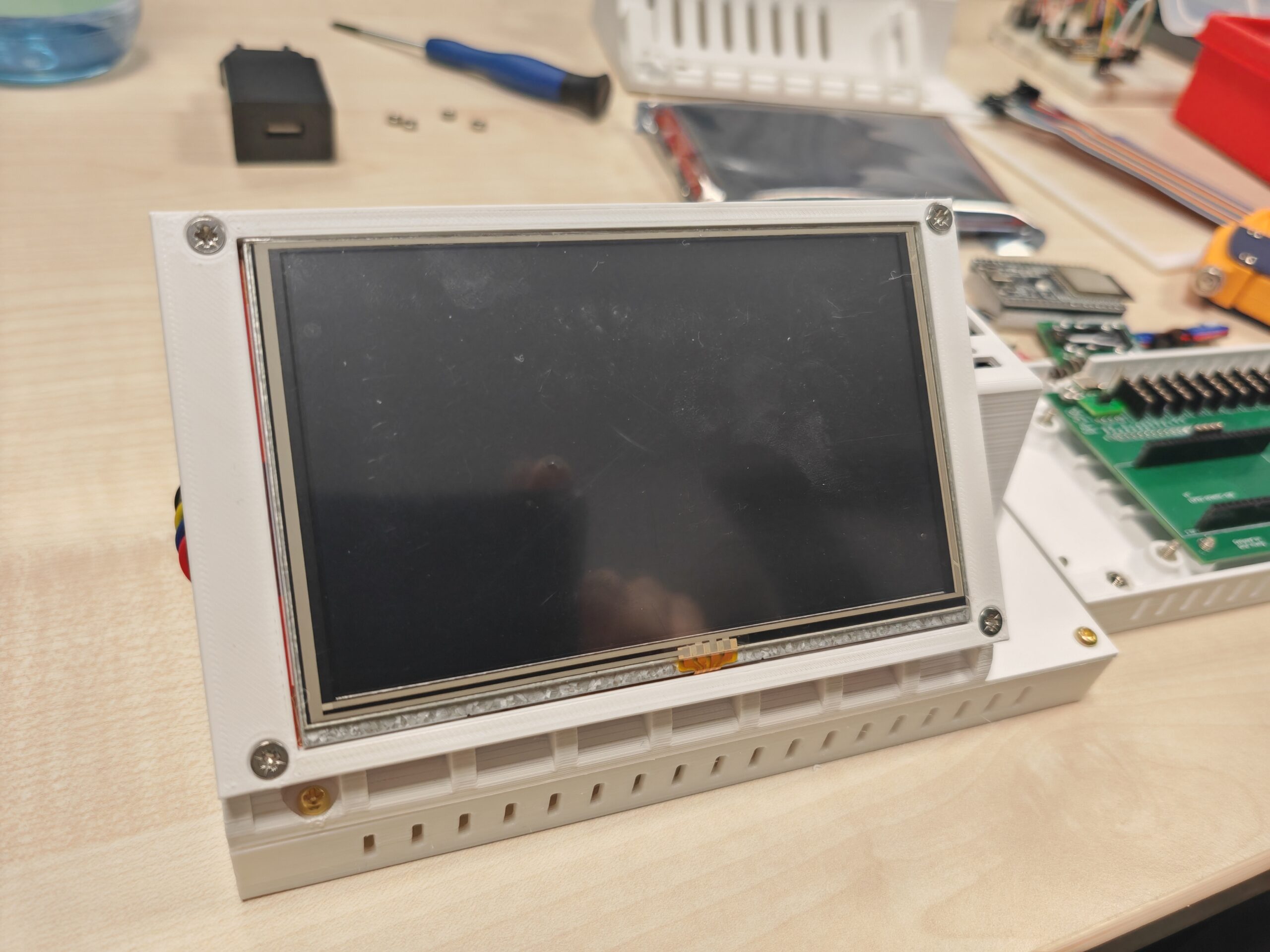
5. Endkontrolle & Hochladen der Firmware
Prüfen Sie, ob alle Komponenten richtig angeschlossen sind und ob alle Steckverbindungen sicher sind. Wenn Sie unserer obigen Anleitung gefolgt sind (mit Ausnahme des Windsensors Rev. C), sollte Ihr Ressourcenwächter wie folgt aussehen:
Schließen Sie den Mikrocontroller (ESP32) mit einem Micro-USB-Kabel an den USB-Anschluss des Computers an. Hinweis: Einige USB-Dockingstationen können Probleme verursachen. Wenn bei der Verwendung einer USB-Dockingstation Probleme auftreten, z. B. wenn das Gerät nicht erkannt wird, wird empfohlen, das Gerät direkt an den USB-Anschluss des Computers anzuschließen.
Der spezifische COM-Port des Mikrocontrollers kann im Gerätemanager eingesehen oder geändert werden, oder Sie können direkt den neuen COM-Port einsehen, der nach dem Anschluss an den ESP32 in der Arduino IDE hinzugefügt wurde. Wenn Sie zum ersten Mal einen Mikrocontroller verwenden, hat Ihr Computer möglicherweise keinen Treiber für die CP210x-Chips. Sie können sich dieses Tutorial ansehen, um den erforderlichen Treiber für die serielle Schnittstelle zu finden.
Führen Sie die folgenden Schritte aus, um die Arduino IDE zum Hochladen der Firmware auf den ESP32 zu verwenden. Wenn Sie mit diesem Verfahren vertraut sind, können Sie diesen Teil überspringen.
- Arduino IDE herunterladen und installieren.
- Nach der Installation öffnen Sie mit einem Doppelklick
arduino_gui_TouchDisplay.inoDatei (befindet sich im Ordner./firmware/Arduino/arduino_gui_TouchDisplay, siehe unser GitHub-Repo (https://github.com/RWTH-E3D/ressourcenwaechter)). - Installieren Sie die ESP32-Entwicklungsplatinen in der Arduino IDE, siehe diese beiden Tutorials: ESPRESSIF Tutorial, RANDOM NERD Tutorial.
- Installieren Sie die in der Datei
requirements.txtdocumentierten Bibliotheken gemäß dieser Anleitung. - Dekommentieren Sie
#define UPDATE_RTCin Zeile 17 (um die RTC beim ersten Hochladen zu aktualisieren). - Konfigurieren Sie die Upload-Einstellungen:
- Board: ESP32 Arduino – ESP32 Dev Module
- Upload-Geschwindigkeit: Es spielt keine Rolle. Wenn Sie Probleme beim Hochladen haben, wählen Sie eine langsamere Geschwindigkeit z. B. 115200.
- Port: COMxx (Sie können den COM-Port Ihres ESP32 im Gerätemanager herausfinden, oder einfach den Stecker ein- und ausstecken, um zu sehen, welcher COM-Port erscheint).
- Sie können die anderen Einstellungen leer lassen (Standardeinstellungen verwenden). Wenn Sie den Stromverbrauch des ESP32 minimieren wollen, können Sie eine niedrigere CPU-Frequenz wählen (z.B. 80MHz).
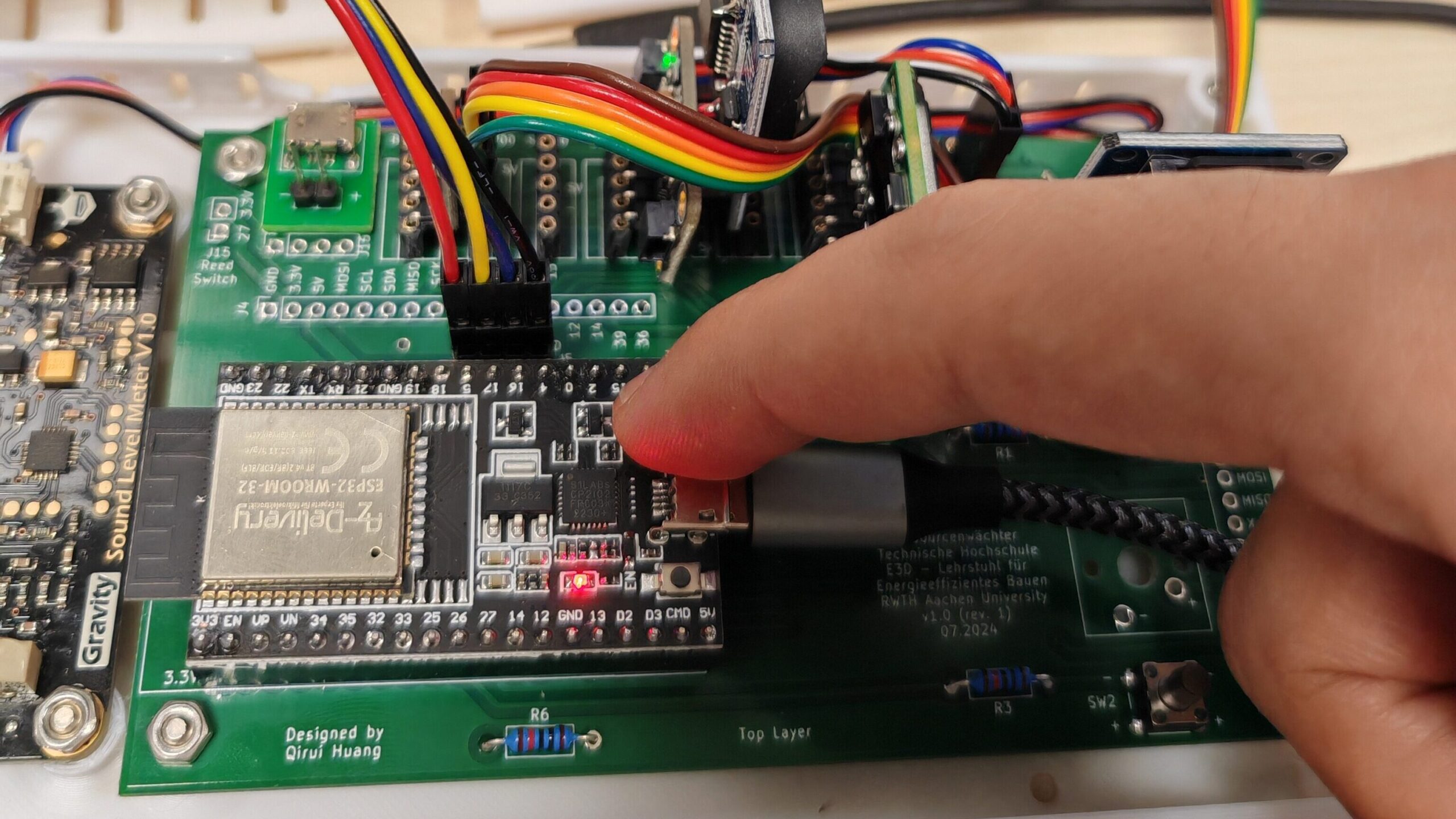
- Laden Sie die Firmware auf ESP32 hoch. Dazu müssen Sie die Boot-Taste am ESP32 gedrückt halten, wie auf dem Foto unten gezeigt. Wenn Sie nicht wissen, wie Sie die Firmware hochladen können, lesen Sie bitte dieses Tutorial.
- Kommentieren Sie
#define UPDATE_RTCin Zeile 17 (um die RTC-Aktualisierung zu deaktivieren) ->//#define UPDATE_RTC - Laden Sie die Firmware erneut auf ESP32 hoch.
Hinweis: Wenn Sie eine andere Sensorkonfiguration als die in dieser Anleitung beschriebene verwenden, passen Sie die Konfiguration in der Datei module_cfg.h an. Details finden Sie unter Sensorkonfigurationen.
Nachdem die Firmware hochgeladen wurde, kann das Gehäuse zusammengebaut werden. Achten Sie darauf, dass die Überbrückungsdrähte beim Zusammenbau nicht beschädigt werden.


6. Display GUI hochladen
Bereiten Sie nach dem Zusammenbau eine FAT32-formatierte Micro-SD-Karte vor und kopieren Sie den GUI-Code (.tft-Format) auf die SD-Karte. Stellen Sie sicher, dass sich nur eine Datei auf der Karte befindet. Siehe das folgende Beispiel (Nextion-Display, deutsche Version):

Die verschiedenen Sprachversionen der GUI für das Nextion-Display finden Sie hier:./software/gui/Nextion_HMI
Die .tft Dateien für TJC Display sind im folgenden Ordner zu finden : ./software/gui/TJC_USART_HMI
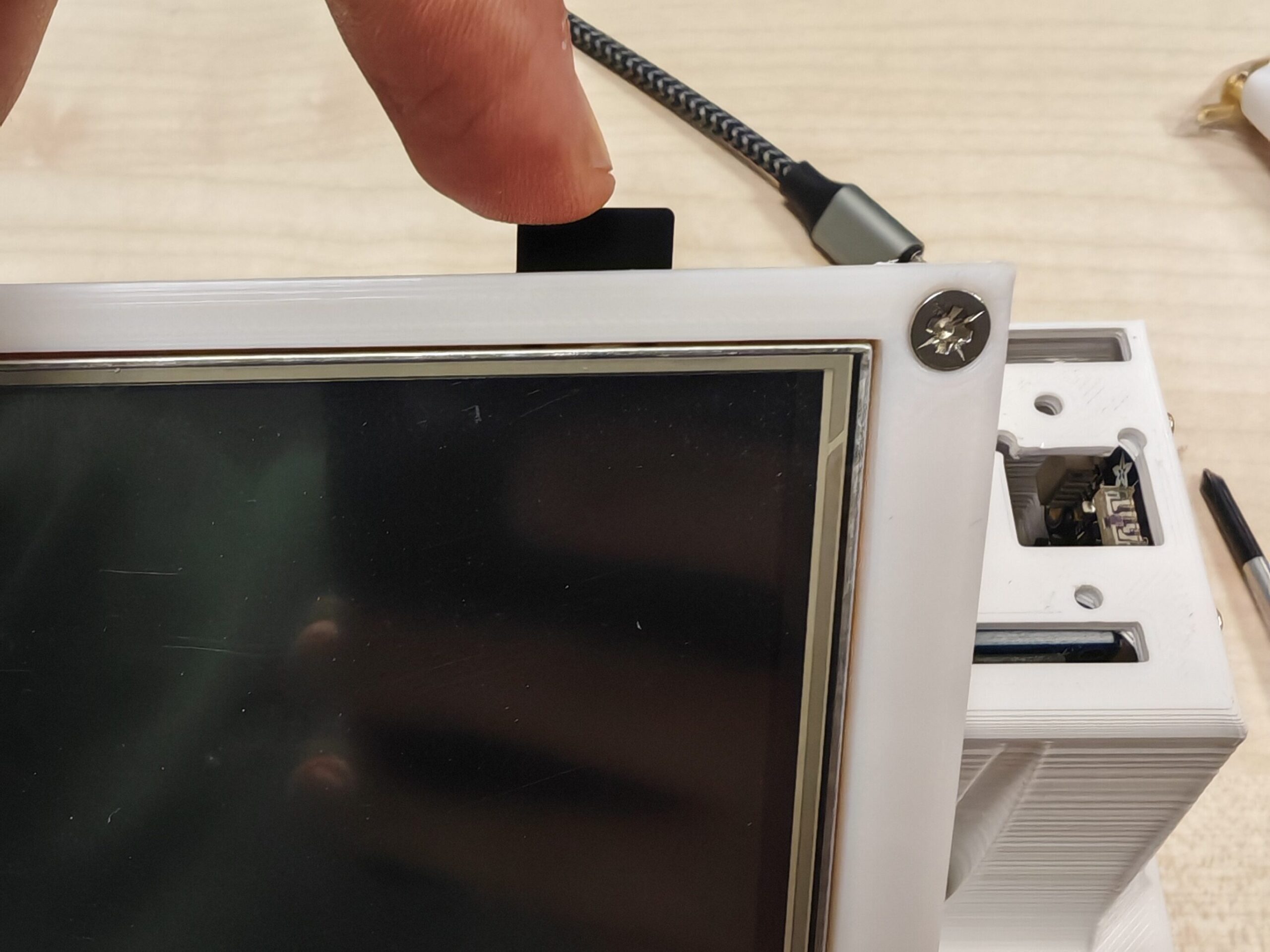
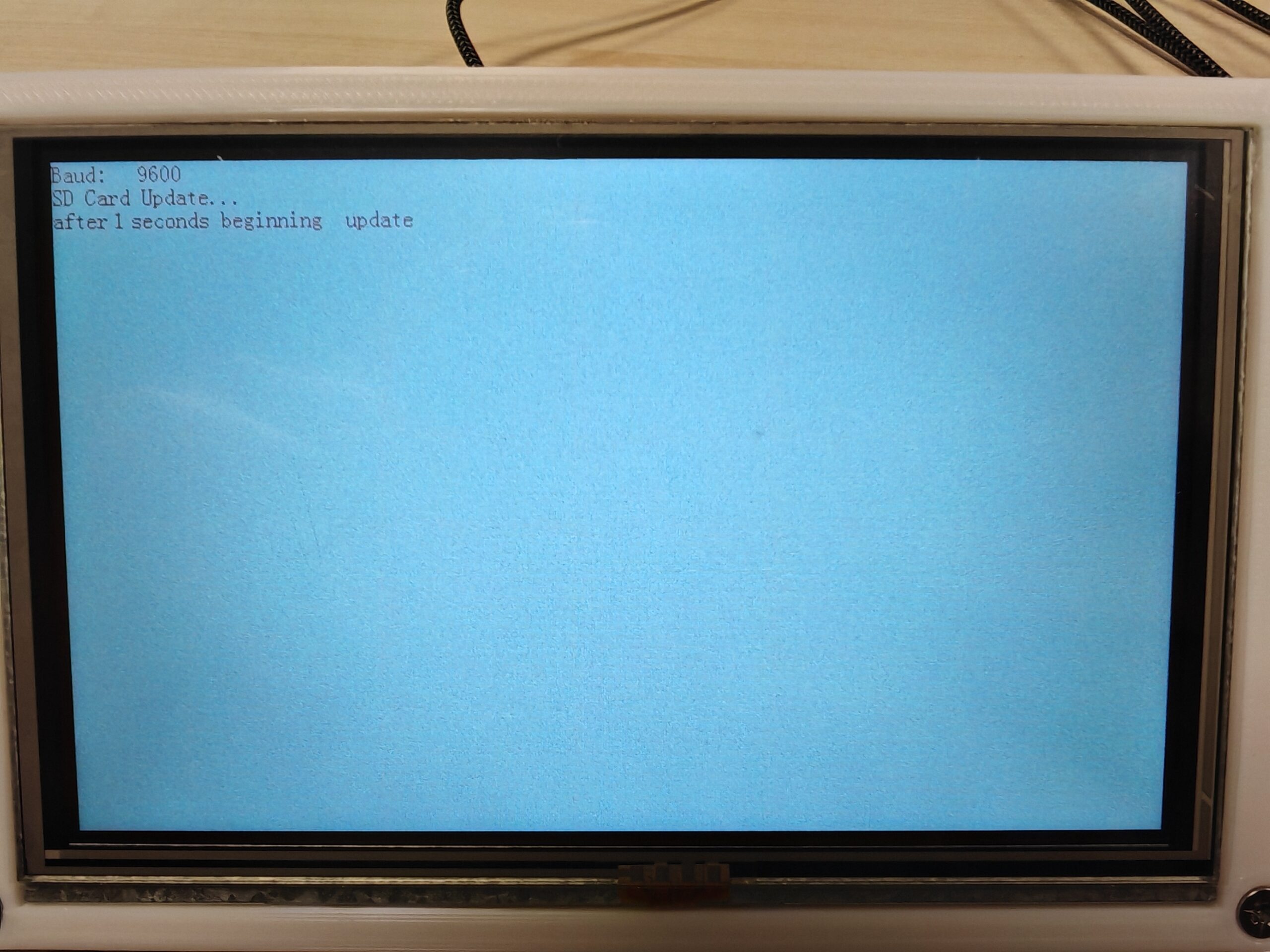
Stecken Sie nun die Micro-SD-Karte in den Steckplatz auf der Rückseite des Displays, während das Gerät ausgeschaltet ist. Verwenden Sie ein USB-Kabel, um den Ressourcenwächter mit Strom zu versorgen (über den USB-Anschluss auf der Rückseite des Geräts). Nach dem Einschalten sollte auf dem Display angezeigt werden, dass die GUI aktualisiert wird, wie unten dargestellt. Schalten Sie den Ressourcenwächter nach dem GUI-Update (und wenn die LED aus ist) aus.
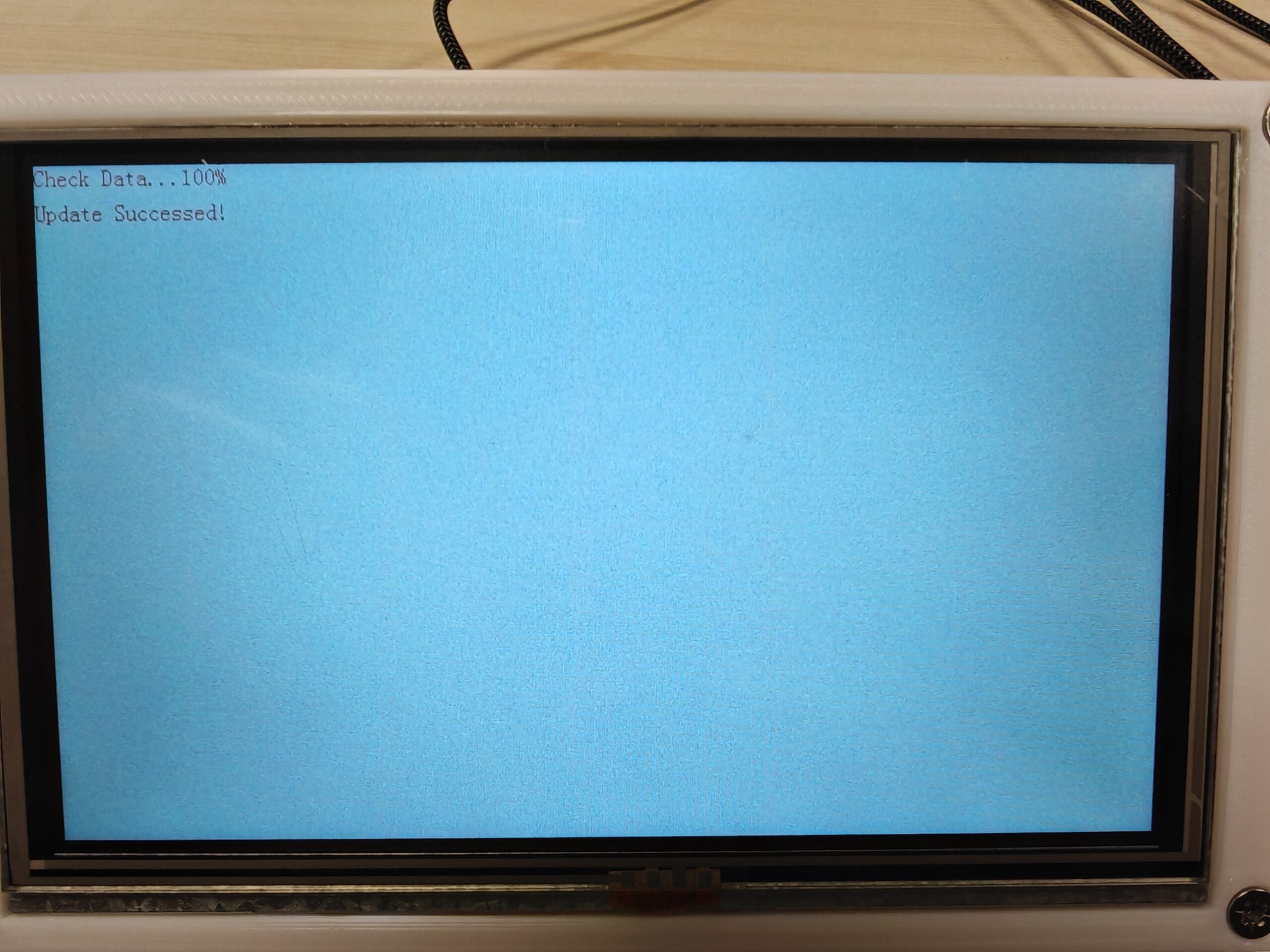
Nach dem erneuten Einschalten sollte die GUI normal angezeigt werden. Der Ressourcenwächter braucht beim ersten Booten eine kurze Zeit, um die Daten auf der Micro-SD-Karte zu lesen, und nachdem die LED ein paar Mal blinkt, sollten alle Daten angezeigt werden.
7. Letzte Schritte
Nachdem Sie die Firmware sowie die GUI hochgeladen haben, können Sie den Ressourcenwächter in Betrieb nehmen!
Um die Qualität der Überwachung und die Benutzerfreundlichkeit zu verbessern, können Sie auch die folgenden Schritte durchführen:
- Kalibrieren Sie die Sensoren, siehe Sensorkalibrierung für Details. Passen Sie nach der Kalibrierung die entsprechenden Parameter in der Datei
variables.han, öffnen Sie das Gehäuse und laden Sie die ESP32-Firmware erneut hoch.
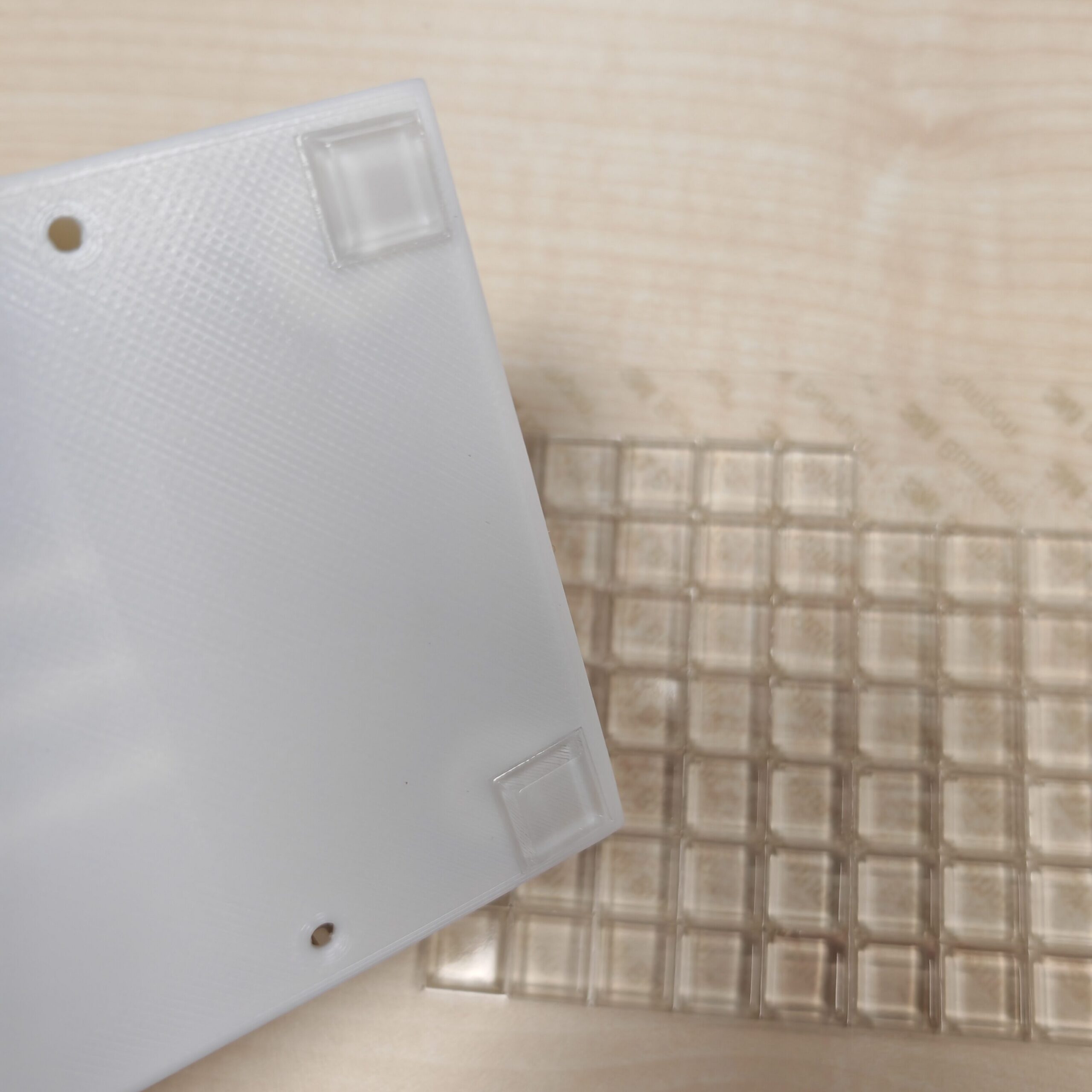
- Bringen Sie Anti-Rutsch-Pads an der Unterseite des Ressourcenwächters an, um zu verhindern, dass er nach hinten rutscht, wenn Sie auf das Touch-Display tippen.
- Wenn Sie mehrere Ressourcenwächter haben, vergessen Sie nicht, sie zu nummerieren!